無線ブログ集
| メイン | 簡易ヘッドライン |

 QRPな自作の日記
(2023/12/28 18:35:38)
QRPな自作の日記
(2023/12/28 18:35:38)
 衛星自動追尾コントローラ検討
(2021/2/27 18:50:08)
衛星自動追尾コントローラ検討
(2021/2/27 18:50:08)

CALSAT32は、JR1HUO OM殿製作のソフトです。
先日、仰角ローテーターのプロトを作り動かしてみましたが、やはり衛星軌道計算アプリに連動して衛星を自動追尾する機能を実現しないとせっかくの能力が活かされないと思いました。
しかし、当局はWindous等PC側で動くアプリケーションソフトに関してはからっきしダメで、自力でなんとかしようにも、何から手を付けたらよいのかさえわかりません。
たまたまではありますが、衛星の軌道を計算してくれるソフトを検索して最初に見つけたのが「CALSAT32」というものです。なんと、このアプリには、市販のローテーターを自動で駆動する機能が搭載されています。
この機能を使って何とかできないかと、検討を始めてみました。
その結果、やっとI/Fが動き始めたのですが、紆余曲折があったので備忘録として記録を残すことにしました。
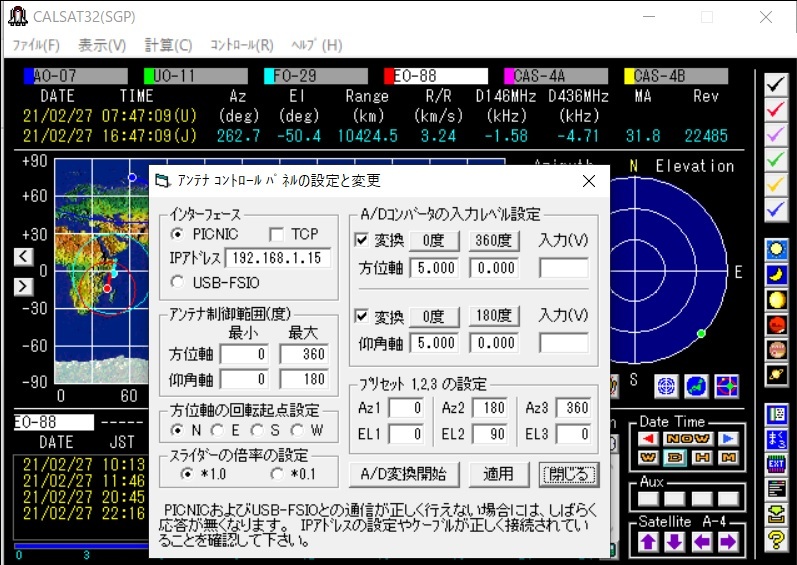
まずこのCALSAT32から自動追尾をするためのI/Fとして設定されているのが
① PICNIC
(秋月で販売されてた、製造元は、TryState すでに生産終了)
② USB-FSIO
(PICによるHIDデバイス。製造元はKm2NetInc 現在も入手可)
このいずれかが必要であり、このI/Fとローテーターとの接続は、
回転角:0~5V のアナログ電圧(ローテータからの出力)
入力角度と電圧範囲は設定可
回転方向制御:左/右、上/下のスイッチ制御
(オープンコレクタによるスイッチ)
つまり、ローテーターコントローラーは、アンテナが向いている方向(左/右、上/下)の角度を0~5Vの範囲で出力し、左/右、上/下の制御するスイッチ入力を持てばいいということになります。
勿論、CALSAT32に接続する①or②のI/F機能も取り込めればいいのですが、まずはI/Fを使って動かせるところまでを検討することにしました。
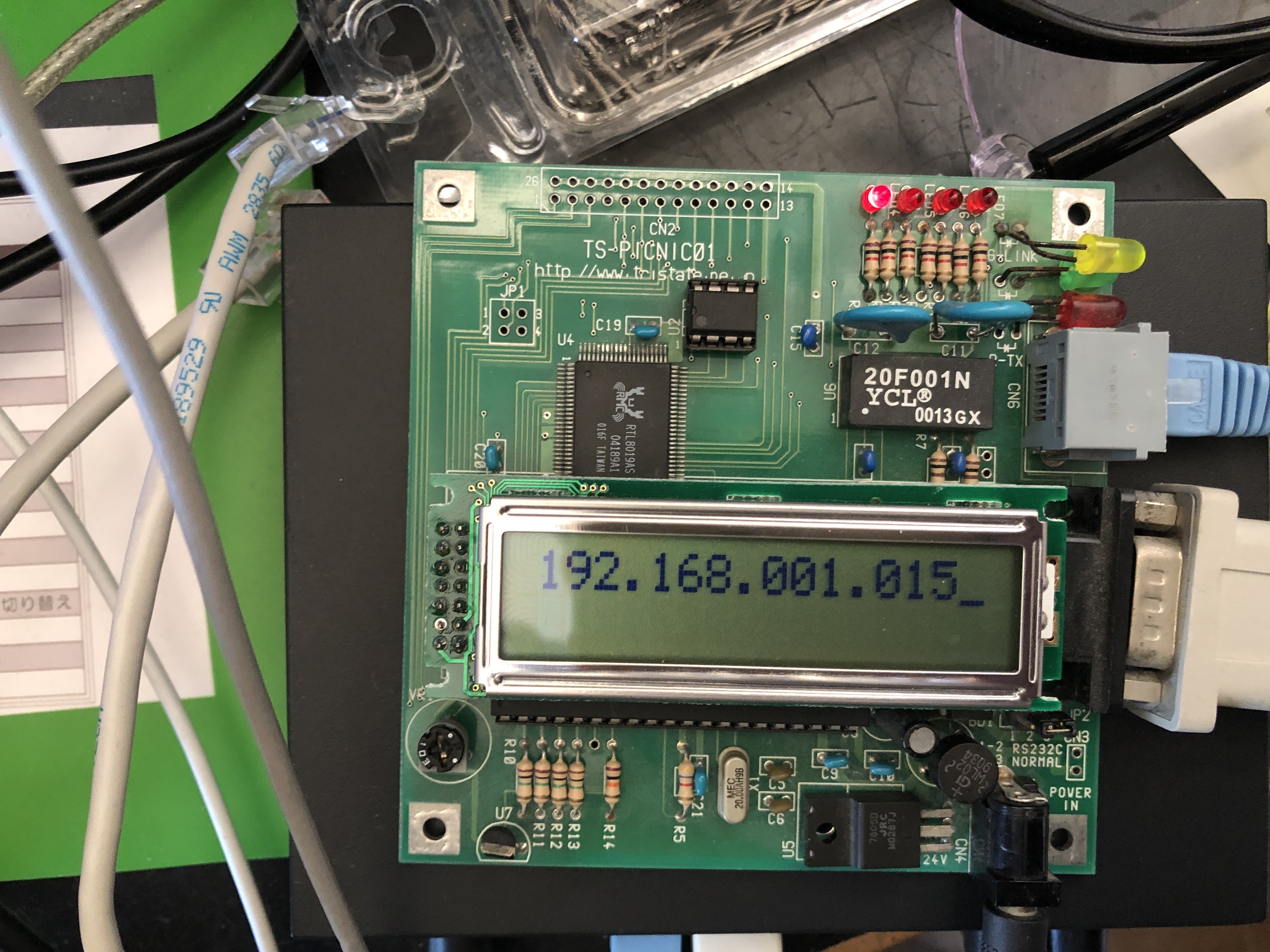
まずI/Fです。PICNICと聞いて、もしかして持っているのでは? 引越しで捨てたかと思いつつ探したら、出てきました。なんと初代です。20年くらい前? おそらくネットワークを介して何か制御できればと思い買ったのでしょう! 記憶からは、サンプルソフトを動かして終わったような?! PCのソフトを作れませんからね!
説明は、第二世代でやられているので動くのかどうかよくわからなかったのですが、まず初代のPICNICを動かすところから始めました。
なんと2001年1月号のトラ技に解説記事があり、これも自炊したPDFがあったのでこれを参考にやってみました。
PICNICの操作
① JP2をショートして BootstarapModeで起動する
(RS232Cで制御できるようになる)
② RS232Cは、ストレート接続
③ 秋月のUSB-RS232C変換ケーブルはPL2303を使用しており
Win10ドライバをメーカーサイトからダウンロードし、
インストールしないと動かない(偽物対策らしい)
④ 9600ボー、8bit、1stopbit、ノンフロー
⑤ TeraTermなどで、シリアル接続、起動すると
PICNIC> が出る
⑥ help 〓 で操作ヘルプ
⑦ cofig 〓 で現在の設定値
⑧ データの変更は 小文字でヘッドレター = 設定値
ex. i=192.168.1.15 〓 :IPアドレスの設定
l=1 〓 :液晶表示 #はいらない
PICNICのLAN接続
① JP2のショートを外して、ノーマルモードで起動
② 初代PICNICは、PCとTCP接続ではなく、UDP接続
③ PCのLAN端子とPICNICの接続は、
直接の場合クロスケーブル(動かなかった?!)
HUB経由の場合、ストレートケーブル
④ 接続状態の確認は、PICNICに設定したIPアドレスに
PINGで確認
⑤ PICNICの液晶表示では、ex.192.168.001.050 となり、
PINGはこれでOKだが、CALSAT32のコントロール設定に
このまま入力すると動かない。通信タイムアウトとなる。
⑥ CALSAT32のIPアドレス欄には、ex.192.168.001.50 と入力すると動作する。
これで、PICNICに入力された方向を示す電圧の値が表示される(何も入れてないので0V)
コントローラーで、方向を指示するボタンを押すとPICNICのそれに相当するビットのLEDが点灯する。

ここまで確認できれば、あとは、ローテーターコントローラー側の方向を示す電圧が出せるようになれば
とりあえず自動追尾が可能になると思われ、第一次の検討は完了としました。
蛇足:CALSAT32は、追尾する衛星の方向角、仰角をリアルタイム(数秒置き?)でテキストを吐き出しており、この値をUSB経由シリアルで流せるような中間アプリを作れれば、PICNICなどのH/W I/F無しで、コントローラーでUSBシリアルケーブルだけでダイレクトに角度制御できるようになるのですが、PCアプリを作れないので、まずはH/W I/Fを介して電圧制御、接点制御でトライしてみます。
もう一つ見つけたKSATという軌道アプリの追尾ソフトは、このKSATから吐き出されたテキストデータをもとにPICNICを制御するコントロールアプリになっているようです。
KSATは、JH3RKB OM殿製作のソフトです。
execution time : 0.024 sec