無線ブログ集
| メイン | 簡易ヘッドライン |

 QRPな自作の日記
(2023/12/28 18:35:38)
QRPな自作の日記
(2023/12/28 18:35:38)
 Pocke ELETATOR その後
(2021/11/18 14:59:03)
Pocke ELETATOR その後
(2021/11/18 14:59:03)

プロト3
衛星追尾に使用できそうなV/Uの八木宇田アンテナもでき、やっと仰角ローテーターの完成に向けステップを進めようかと動き始めました。
その途中がなかったわけではないのですが、144MHz用と430MHz用のビームアンテナを回すとなると、仰角ローテーターを含めてそれなりの重量になり、今のローテーター「Pocke TATOR」だと何回か回している間にイナーシャで角度がズレてしまうという問題があって、これは仰角対応のみではなくて、方向角のみのアンテナでもアンテナの重量や取り付け方で同様の問題が指摘されその対策をやっておりました。
また、仰角側も二次プロトを製作し、ローカルのOMさんに試験をお願いして使ってもらっていました。
こちらも構造上多くの3Dプリントした部品を使っていましたが、弱いところも多く、今一つこの構造で進める自信がありませんでした。
そうするうちに時間が過ぎてしまったわけですが、これまでの構造に拘らずに、まず使用に耐えられる強度を確保しようと設計をやり直しました。
それでできたのが、最初の写真のプロト3です。
因みにこれまでの変遷は、下記の写真の通りです。

プロト1

プロト2
仰角部の外装を3Dプリント品で構成していたので、この部品1個だけで10時間以上の時間がかかったのと、強度的にもちょっと弱いかな?!と、他のカバーなどを含めると丸2日間プリントしっぱなしとなり、今一つ気乗りがしませんでした。
また、方向角部との連結部分も2個のアンテナをそれなりのブーム長で搭載すると左右の上下の揺れに対して、ユラユラするところがあり、なんとなくひ弱な感じがして、風が吹くと結構揺れてこれも心配の種でした。
そこで、今回のプロト3では、仰角部の基本構造を方向角と同じ塩ビ管を使用し、減速ギアも中に取り込んでこれまでのギアカバー等の部品も減らしました。
これまでは、1:4のギア比でしたが、このままでは塩ビ管の径が大きくなりすぎるので1:3でギアの設計を行い、何とかVU75サイズ(直径約89mm)入れることができました。
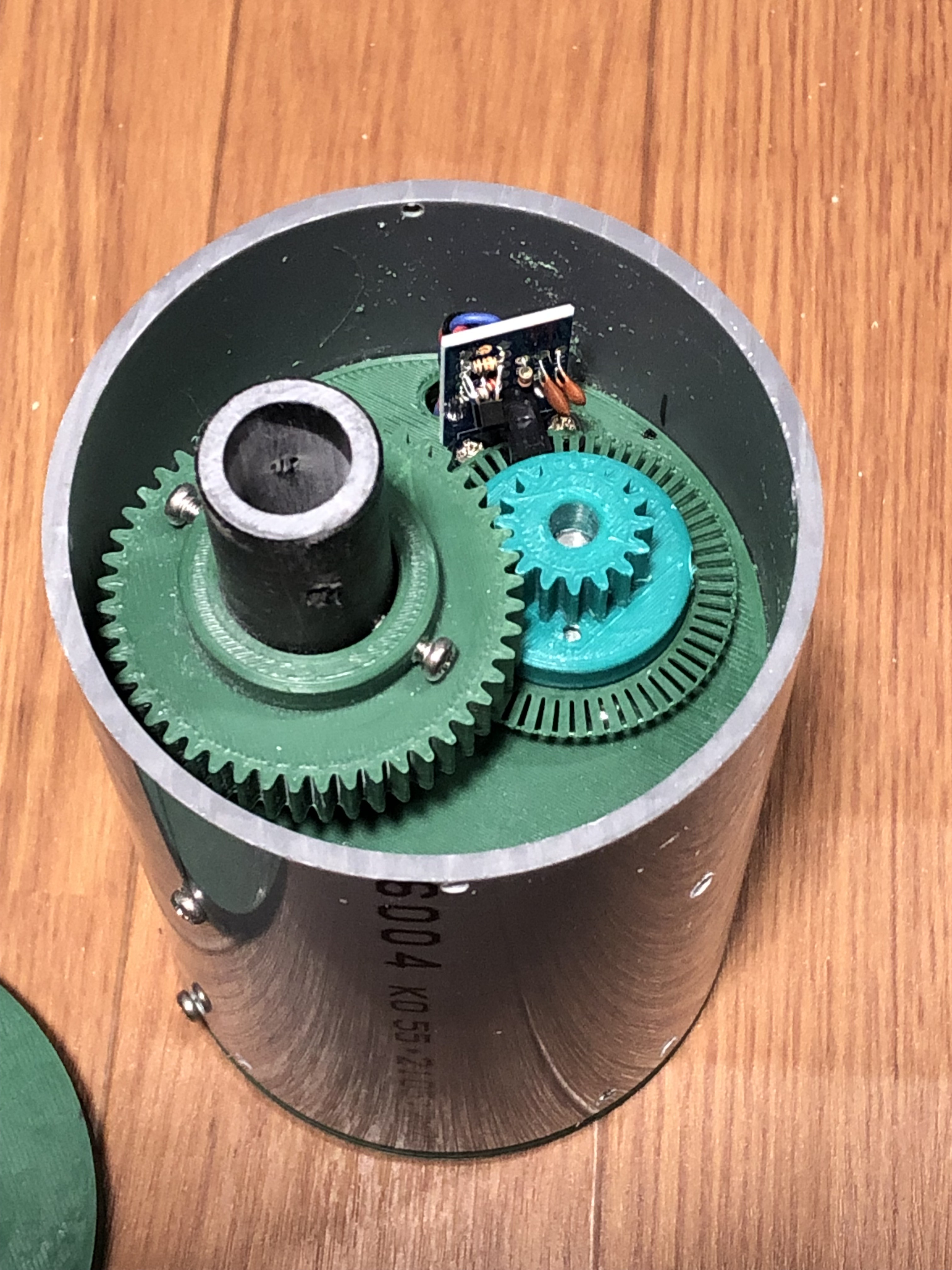
ただし、ギア比が1:3だとステップでの回転角が中途半端になるのと、これまでのエンコーダースリットでは径も大きいので、これも設計をやり直し、スリット数を90から60に減らして、径を小さくするとともに、倍カウントで1度ステップ、通常カウントでも2度ステップになるようにしています。
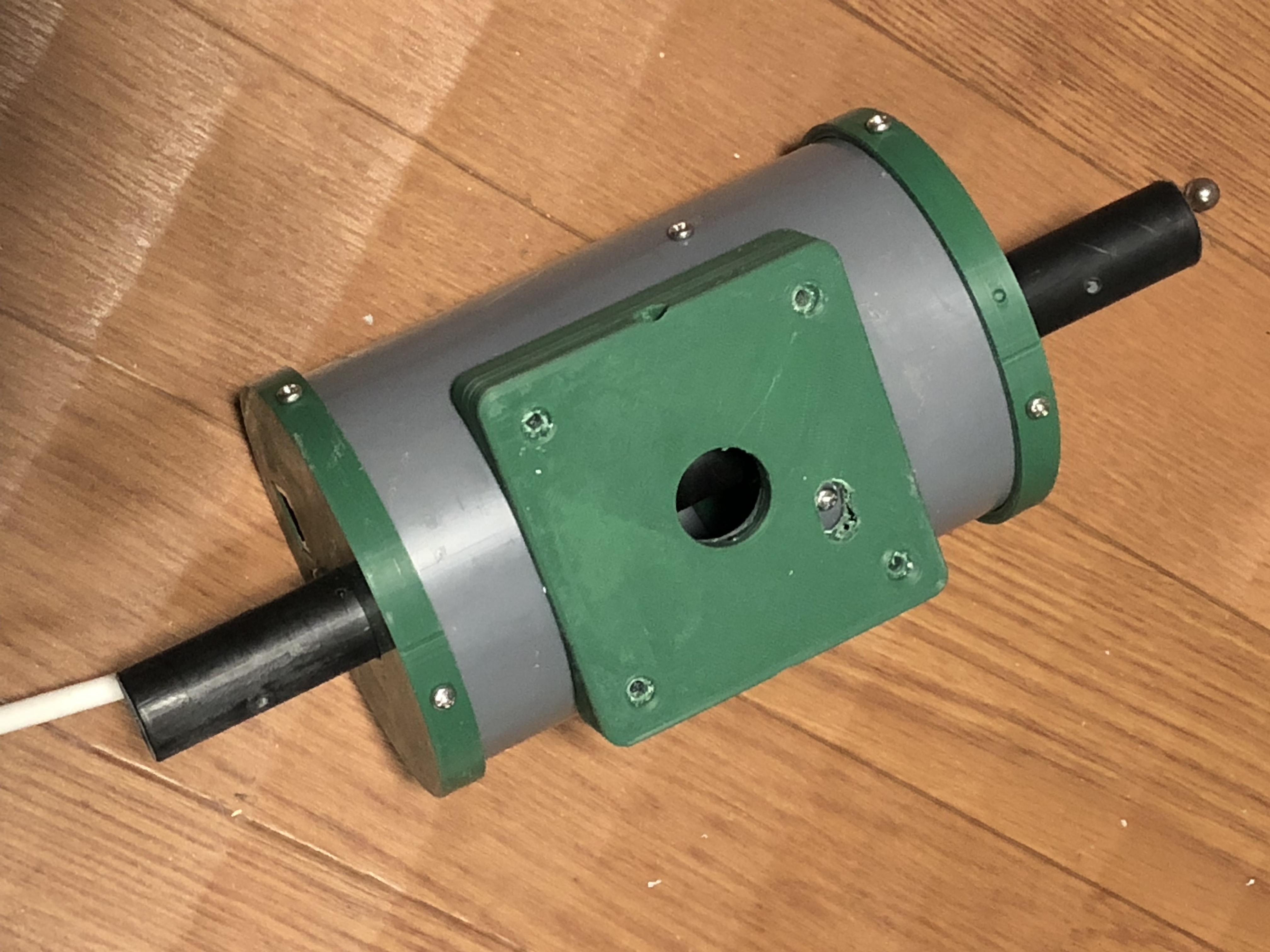
それで出来上がった仰角ローテーターが次の写真です。

アンテナを回転させるブームが短くなっていますが、これは輸送対策です。
1m程度のブームがついた状態だと、140サイズ以上の大きさとなり輸送コストがかさみます。
そこで、本体側のブームシャフトは短くし、延長ブームシャフトを左右別々に連結するようにしました。
これでコンパクトに梱包することができます。(苦肉の策です)
次は、方向角ローテーターとの連結部分です。
これまでは、下の写真のような方向角ローテーターからの回転シャフト(径25mm)を差し込んで、ネジ固定し、一応方向角ローテーターの上面で受けるかたちで結合させていました。
しかし、これでは前述のように左右の上下の揺れに耐えられませんでした。
そこで構造的に、まず回転径を大きくして、更に方向角側と仰角側の連結部の接触距離を増やして左右の上下の揺れを軽減する構造としました。更に、上下の浮が発生しないように、裏側より挟み込む構造としてよりユラユラの発生の軽減化を図りました。




こうした構造にすることの問題点もあります。摩擦です。
方向角ローテーターの回転力では、通常は大丈夫としても風などによる圧力で回転できなくなるのではないかという懸念もありました。これまでのアンテナの回転イナーシャで回転角がズレるという問題もありましたし、小型のアンテナを一基のみ回すのなら問題はなかったと思うのですが、重量のある仰角ローテーターとさらに2基のアンテナを回すとなると、少しでも回転力を上げた方が良いのではないかと考え、方向角ローテーターも、同じ1:3のギアを追加し専用設計となるようにしました。
同じギア比にすることによって、ギアモーターを乗せるモーターベースや、ギア、エンコーダースリットなど部品の共通化も図ることができました。
1:3ギア追加により、方向角回転は1回転70秒以上かかりますが。
こうしてできたのが、プロト3です。

コントローラーは、プロト1で作ったもののソフト変更(回転方向、ギア比での回転角)を行って、とりあえずの試験には耐えております。
(まだまだバグや検討事項がたくさんありますが)
この状態で、V/Uの使えるアンテナもできているので衛星自動追尾を行い、サテライト通信デビューも果たすことができました。
再生できない場合、ダウンロードは🎥 こちら
10倍速のデモモードにて、自動追尾
今後はこれをベースに詰めていきたいと思います。
execution time : 0.026 sec