無線ブログ集
| メイン | 簡易ヘッドライン |

 QRPな自作の日記
(2023/12/28 18:35:38)
QRPな自作の日記
(2023/12/28 18:35:38)
 Pocke TATOR 機能追加・性能改善
(2022/4/24 11:12:09)
Pocke TATOR 機能追加・性能改善
(2022/4/24 11:12:09)

長文です。備忘録として投稿します。
最初にPocke TATORの検討を始めたのがいつ頃だったのか忘れてしまって、このBLOGを調べてみたら2020年8月でした。
自分用に検討を始めたのですが、プロト2、プロト3、プロトファイナルと紹介をしていたら、頒布のご要望が出てきて、頒布を開始したのがその年の12月でした。
http://blog.toshnet.com/article/187852481.html
http://blog.toshnet.com/article/188177319.html
約一年半が経過して、当初は430MHzや1.2GHzの軽量ヤギウダアンテナを回すのが目的でしたが、屋根裏での設置事例や、衛星通信(145MHz/435MHz)に使用されたり、ついには衛星通信の自動追尾への要求も出てきたり、衛星やるなら仰角も動かしたいという要望も出てきたりと、それなりにそれぞれが興味深く、対応を検討してきました。衛星の自動追尾は途中からソフト対応しました。
http://blog.toshnet.com/article/188441950.html
http://blog.toshnet.com/article/189143723.html
一方、何か新しいことをやると必ず課題や問題点が出てきます。都度、検討や対策をしてきましたが、なかなか収束せず、時間ばかりが経過してきていました。
そうした中で、何とかあらかたの対応ができたのでバージョンⅡとして展開することにしました。
まず、課題・問題点を整理します。
(1) アンテナが軽量(1Kg以下)でも、回転角度がズレる。
(2) 衛星自動追尾では、数十度のズレが発生することがある。
(3) モーター軸とアンテナポールのジョイントが3Dプリンタによる樹脂で強度が心配。
(4) 内蔵電池が006P型のため、衛星追尾などでは持たない。
(5) 衛星通信は色々忙しく、操作手順を単純化したい。
(6) マイコンボードやモーター等、価格、輸送費が大幅アップ。
今回の機能アップ・性能改善(改悪も含む)は、
基本は、角度ズレ対策がメインで一番大きな悩みで時間がかかりました。
(1) 回転角度ズレ対策として、基準角度検出スイッチ追加。(ズレても90度おきに補正)
(2) アンテナのイナーシャによるズレ防止のための回転制動機能追加。
(3) モーター軸とアンテナポールジョイントを金属製に変更。
(4) 衛星が可視範囲に入る前に、追尾の予約、AOS in時に自動追尾開始機能追加。
(5) 電池内蔵は無しに。(ケースは薄くなりました)
(6) 少し価格アップしました。(マイコンボードがなくなり次第再アップ?!)
問題・課題の考察と検討経過
一番の悩みは回転角度ズレで、アンテナを載せず本体のみであれば、正確に指定角度まで回転し、ゼロ度に戻せば、正確に戻ってくれます。
小型の軽量なアンテナでも、うまく動いてました。
しかし、430MHzの10エレ(1kgくらい)で衛星追尾するとズレるという報告をいただいてました。
しかも数十度ズレていることがあると。
自動追尾でなく、オートモードで、例えば30度とか50度回した時には、大きくずれていることはないとも。
衛星自動追尾は、2度ずつ回転するので、追尾が終わった時点でズレが累積しているのではないかというコメントもいただきました。
そこでイナーシャに相当するものとして2kGの鉄アレイの重りをブーム(50cm程度:室内での検証のため)の両サイドに取り付けて、2度ずつ回転させズレの発生状況を確認しました。確かにズレますが、数十度もズレることはありません。
一応対策として、回転角度が指定になった時にブレーキをかける、一瞬逆転させるなどの処理を入れてみました。効果はありましたが、逆回転は、イナーシャの少ない状態だと逆に少しづつ戻ってしまい回転角度が足らなくなるという弊害もありました。
ブレーキは効果がありそうなので、それで様子を見ていました。こちらではそれなりにうまく動いていたのですが、現場ではやはりズレるとのことでした。
ズレている様子をビデオに撮って送ってもらうと、回転を止めたときに反動で戻っていて、またその反動で回転方向、逆方向に振動しながら停止している様子が見れました。
ギアモーターにはバックラッシュがあるので、その分の回転ブレがあります。
これがイナーシャによるブレによって倍加されているのではないかと想定できました。
エンコーダーで回転を検出しているのですが、風などによるバックラッシュの分は、回転方向が分からないため誤検出となるので、停止後は検出を停止しています。
この現象は、回転中に意図的に手でアンテナポールを左右に回すとズレが発生し確認することができます。
しかし、鉄アレイの重りでテストした時は大丈夫だったのに何が違うのか?ということですが、ブーム長が1mを超え,1.5mほどになると意外と回転イナーシャが大きそうだと思いました。
試しに、50MHzの3エレのデルタループ(自作、重量は1kg以下)を使って衛星追尾してみました。
確かにズレます。ブーム長は2mあり、重量は軽いのですが、空間容積はかなりあります。
回転停止するときに振動しています。まさに原因はこれであることが分かり、こちらではこのアンテナで効果のある対策をすればOKだと判断しました。
モーターに負荷はかかるけれど、回転を抑えるように制動すれば振動が抑えられ、ズレがなくなるという報告もいただきました。
そこで、Pocke TATORに適用できる構造を検討しました。
出来上がったのが、写真のような構造です。



本体の天面を5mmのスポンジで、アンテナポールに取り付けた抑えで押付ける構造です。
この構造であれば、これまでのものに改造なく追加できます。
50MHz 3エレデルタループでテストしてみると効果は上々で、繰り返しの追尾テストでも、停止時の振動は抑えられ、ズレはほとんどありません。これが回転振動対策です。

スポンジが経時的にへこんで効果が薄れても、抑えなおせば効果を維持できます。
次は、ズレたときの補正方法です。
屋根裏設置では、ズレていても時々覗かないとわかりませんし、(カメラを導入していただいているケースもあります)面倒な作業です。
よくダイヤルで使うロータリーエンコーダーを搭載して回転方向も検出する方法とか、VRを使用して回転角をアナログ値で検出する方法などを考えましたが、前者は制御線が増えるのと、コントローラーの基板も変更が必要になります。後者は市販のローテーターで採用されている方法で、最初のプロト1がこの方法でしたが間違って余計に回転させてしまうとVRを破壊してしまうので止めました。
後になって衛星追尾を検討した時、殆どがこのVRの電圧値を使って追尾制御されておりこれでもよかったかな!と思ったりもしましたが。
現在のエンコーダースリットによるパルスカウント方式は、制御線が1本で済むのと、いくらでも回転でき(同軸ケーブルがあるので限界はありますが)、設置の時、北ゼロ度を向けた方向を北ゼロ度と設定できるので楽です。結果として、衛星追尾時に北ゼロ度を通過する衛星パスの時も±180度まで反転することなく衛星追尾が可能になりました。
このメリットを活かしながらの対策として、決まった角度(基準角度)にスイッチを置いてそこを通過した時の角度がマイコンの認識とあっているかどうかを確認して、違っていれば補正する方法を考えました。
問題は制御線の増加です。増やしたくありません。
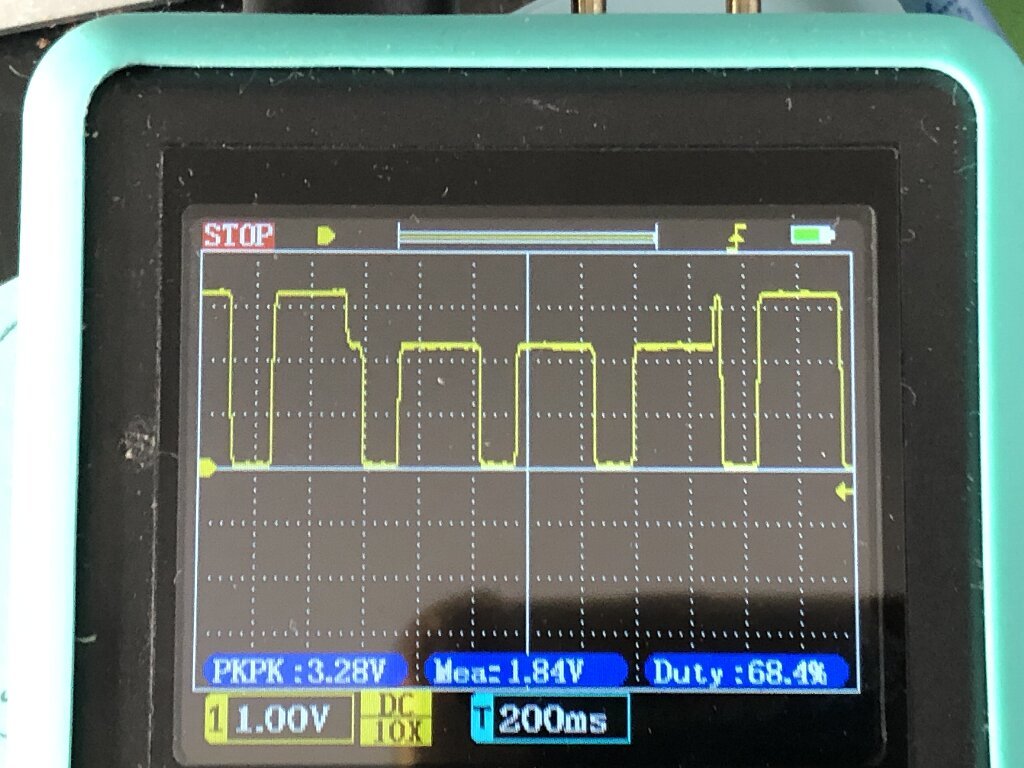
そこでいただいたアイデアが、アナログ値検出です。パルスを送っている線に、スイッチが入った時にパルス高を変えて、この値を読むことでパルスをカウントしながらスイッチを検出することができます。
制御線は増えずこれまで通りです。運がいいことに、コントローラー側もこれまでの経緯で、このパルスカウントの線は、アナログポートと、割り込みポートの両方につながってました。
コントローラー側のハードの変更は一切ありません。
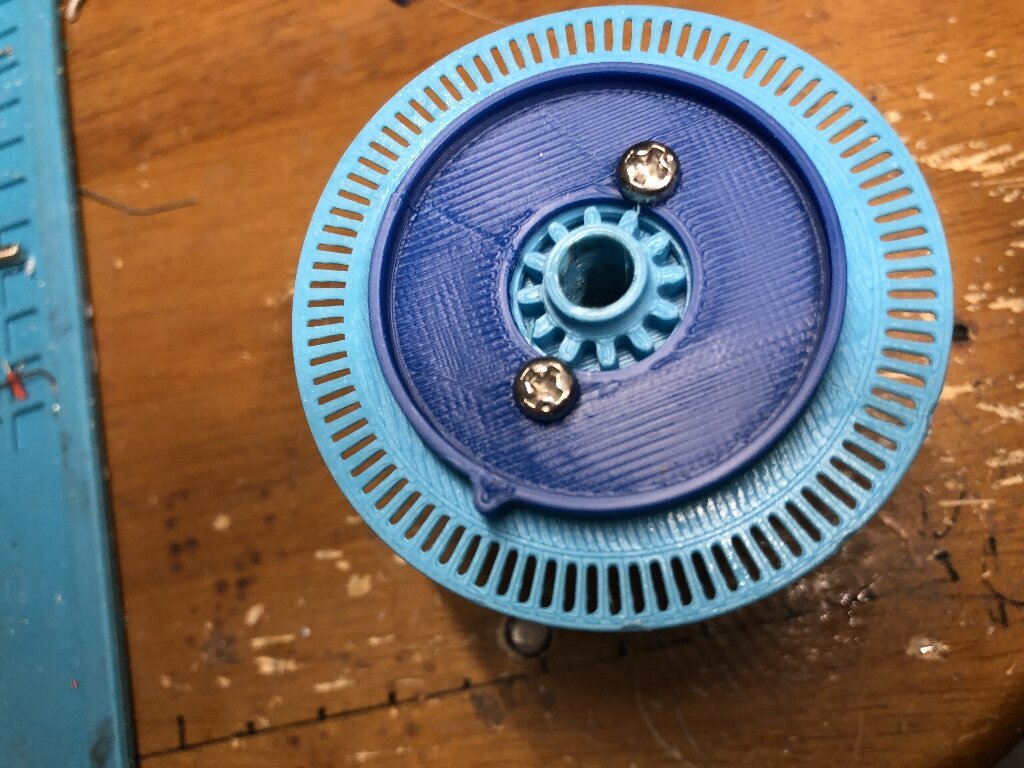
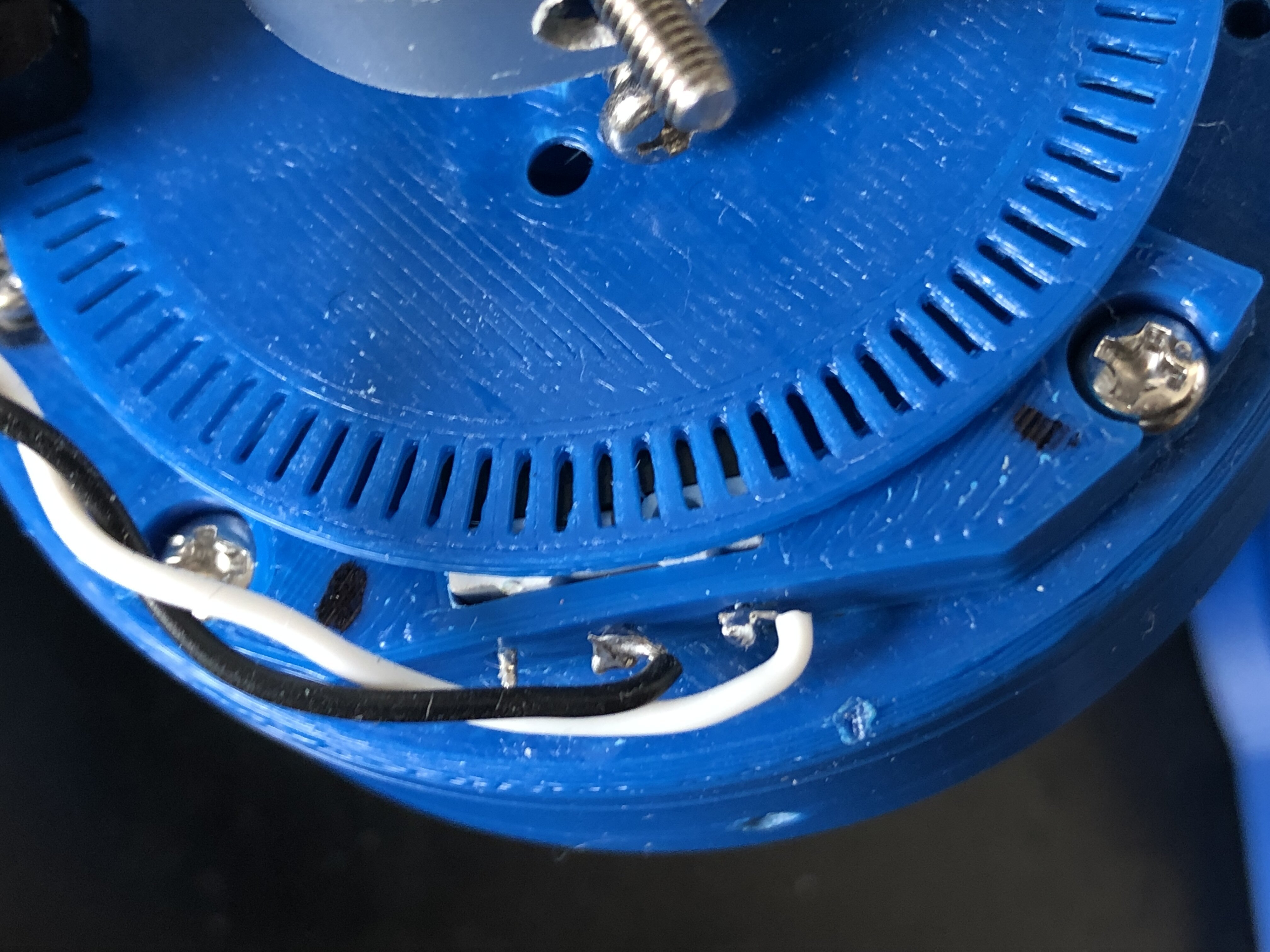
本体側のスイッチの取り付けも、検討の経過がありますが、結果としてそれまでの経緯で空いていた穴を流用して位置決めして取り付ける構造にできました。これによって、これまでの本体に追加の穴あけ加工などをせずにスイッチを取り付けることができました。



最初は、スイッチを押す突起構造は追加部品としたのですが、次の金属ジョイントを使用するためにエンコーダースリットプレートの設計を変更したので、スイッチを押す突起構造と一体化しました。
基準角度スイッチは、360度で一か所であるのですが、それだと、衛星追尾の時に必ずしもそのスイッチを通過するパスとは限らないので、補正が限られるというコメントもあり、90度ごとに360度で4回角度補正できるようにソフトを合わせて対応しました。これでかなりの確率で衛星パスでの補正が可能になりました。

基準角度の決定方法ですが、これまでは北ゼロ度にしたい方向で、ボタンを押して設定しましたが、今回は操作方法は同じで、北ゼロ度にしたい方向でボタンを押すと、アンテナは自動回転を始め、基準角度スイッチまで回転します。そのあと、北ゼロ度まで自動的に戻ります。
これによって、北ゼロ度に設定した方向が基準角度スイッチと何度の角度かを認識して記憶します。
よって、このスイッチの角度を通過するたびに、記憶した角度と違いがあれば補正をするという方式です。
最終的にスイッチを押す突起は90度ごとに4か所作り、90度ごとに補正ができる構造としました。
具体的なソフトでは、いくつかの判断基準の幅を作っています。
その次の対策は、モーター軸とアンテナポールを接続するジョイントの金属化です。
これまでは3Dプリンタで製作した樹脂製でした。これで問題は殆どなかったのですが、移動運用で本体を取り付けたマストごと転倒してしまいこのジョイントが破損したケースがありました。
また、重量の大きいアンテナ搭載で大風に何度も吹き付けられ軸を固定するネジが馬鹿になってしまうケースもありました。
特異ではありますが信頼度は上げておきたいと思っていて、いろいろ思案していましたが、軸穴を空ける作業が手作業では精度が出ないので棚上げになっていました。
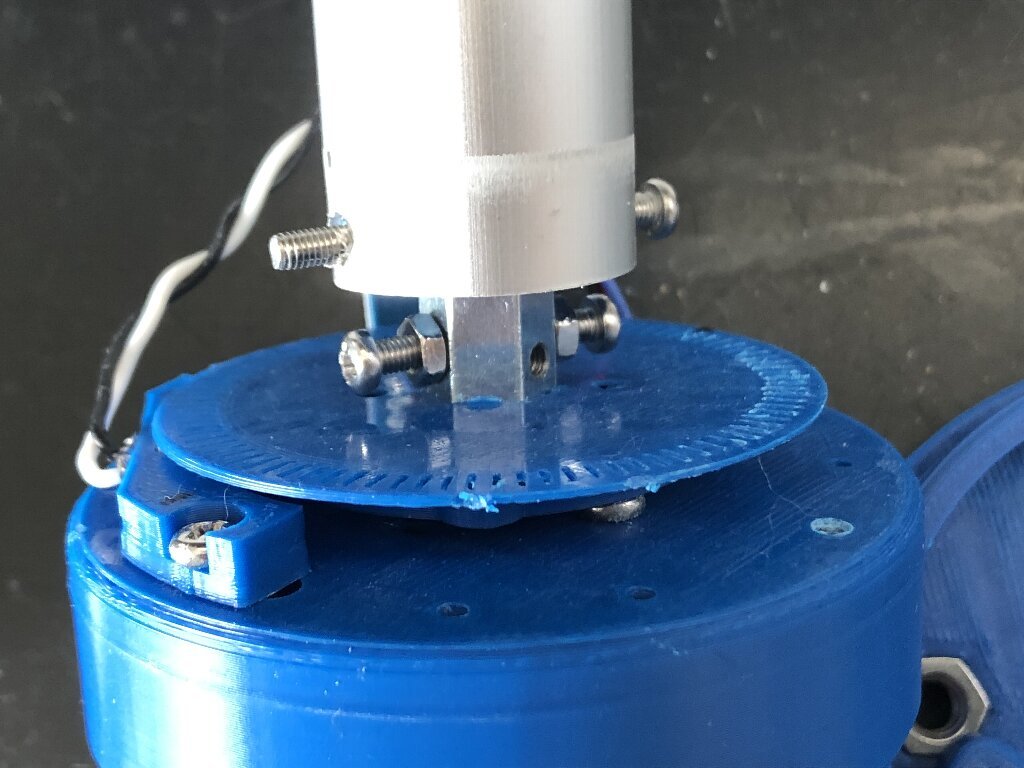
そうした中で、6mmのネジ穴が元々あいている高ナットが使えそうだと思い試作をやってみたら、6mmのネジ穴を6mmのドリルで開けることによってセンターが取れ、モーター軸にピッタリ嵌まることが確認できました。
モーター軸、アルミのアンテナポールを固定する横ネジの加工は必要ですが、ボール盤とタップで何とか加工可能でした。

これまでは、電子工作と3Dプリントした樹脂の加工がメインでしたが、ついに鉄という金属加工までやることになり、いい意味では幅が広がりました。悪い意味では、切削油をかけてのボール盤作業となり、室内がついに金属加工作業場となってしまいました。
しかし、これで懸案のジョイントも解決しました。
次は、衛星追尾スタートの方法です。当局も、初心者ながら衛星通信をやりましたが、パスは5分から20分と短く、ループテストで送受信周波数合わせ、実際にはドップラー効果による周波数変動への対応など結構忙しいです。
アンテナの追尾はスタートしてしまえば自動になるので便利なのですが、衛星が視野範囲に入る前にやることが多くて衛星の自動追尾スタートを忘れてしまうことも多々ありました。
そこで自動追尾したい衛星を決めたら、視野範囲に入る前でもスタートボタンを押すことによって、その時点での衛星の方向に自動回転し、そのあと待機、その衛星が視野範囲に入った時点で自動追尾スタートする機能をソフトに入れ込みました。
勿論、衛星が範囲から外れたときには追尾も自動停止します。
このソフトの検証は、それに対応した衛星パスを見つけてのテストで結構時間がかかりました。
例えば、北ゼロ度通過前に待機した時、スタートが通過後だった時どういう挙動になるのか?
追尾中にほかの衛星に切り替えたらどうなるか? 待機中に切り替えたらとか!
漏れがあるかもしれませんが、一応それなりに動いているようです。
電池内蔵の件は、アンテナを回すモーターを回していますからそれほど持たないのはわかっていましたが、手動で動かす分には使いではあるかと!内蔵できるようにしていました。
しかし、衛星追尾となるとずっと動いていますのでまったく持ちません。
電池の場合もDCジャック端子接続で対応はできますし、今回外しました。
これによりケースの高さ方向は薄くなりスマートになっています。
最後に、製作コストですが、ギアモーターを始め主要部品は中国から調達しています。
理由は、こうした部品は中国が世界的に主力供給元となっており、価格も安いからです。
それによって低価格で作れていました。
しかし、最近では、中国調達よりAMAZONの在庫品が安いという逆転現象まで出てきています。
理由は色々あるのでしょうが、コロナの要因も一つ、半導体の世界的な供給不足は社会問題になっています。それに加え、ウクライナ問題、大幅な円安。原油高、中国調達の輸送コストも上がっています。
使用しているマイコンボードに至っては、3倍以上、調達することも危うい状況です。
マイコンを変えるとなるとソフトの書き直し、基板の変更など手間と時間とリスクを伴います。
現時点での手持ちマイコンボードの数も数えるほどですので、なくなり次第コストアップもやむを得ないかと考えてます。基板変更もありそうなので悩みは多いです。
今回は、モーターコスト、送料などのコストアップを反映せざるを得ませんでした。
すみません。
仰角対応の要望もあり、プロトもいくつか作って動作はしていますが、上記悩みの対応でその後進んでいないのが現状です。
http://blog.toshnet.com/article/189143723.html
実働で動いているのは2台のみです。
懸案の課題も対応が見えましたので、仰角付きもこの後進めたいと思います。
最後に、種々テスト、ご提案をいただきました、JK1LSE OM殿に深謝いたします。
execution time : 0.033 sec