無線ブログ集
| メイン | 簡易ヘッドライン |
リンク 単体表示

 QRPな自作の日記
(2023/12/28 18:35:38)
QRPな自作の日記
(2023/12/28 18:35:38)
現在データベースには 73 件のデータが登録されています。
 430MHz8エレ ヤギウダ性能測定2
(2022/8/15 12:12:23)
430MHz8エレ ヤギウダ性能測定2
(2022/8/15 12:12:23)
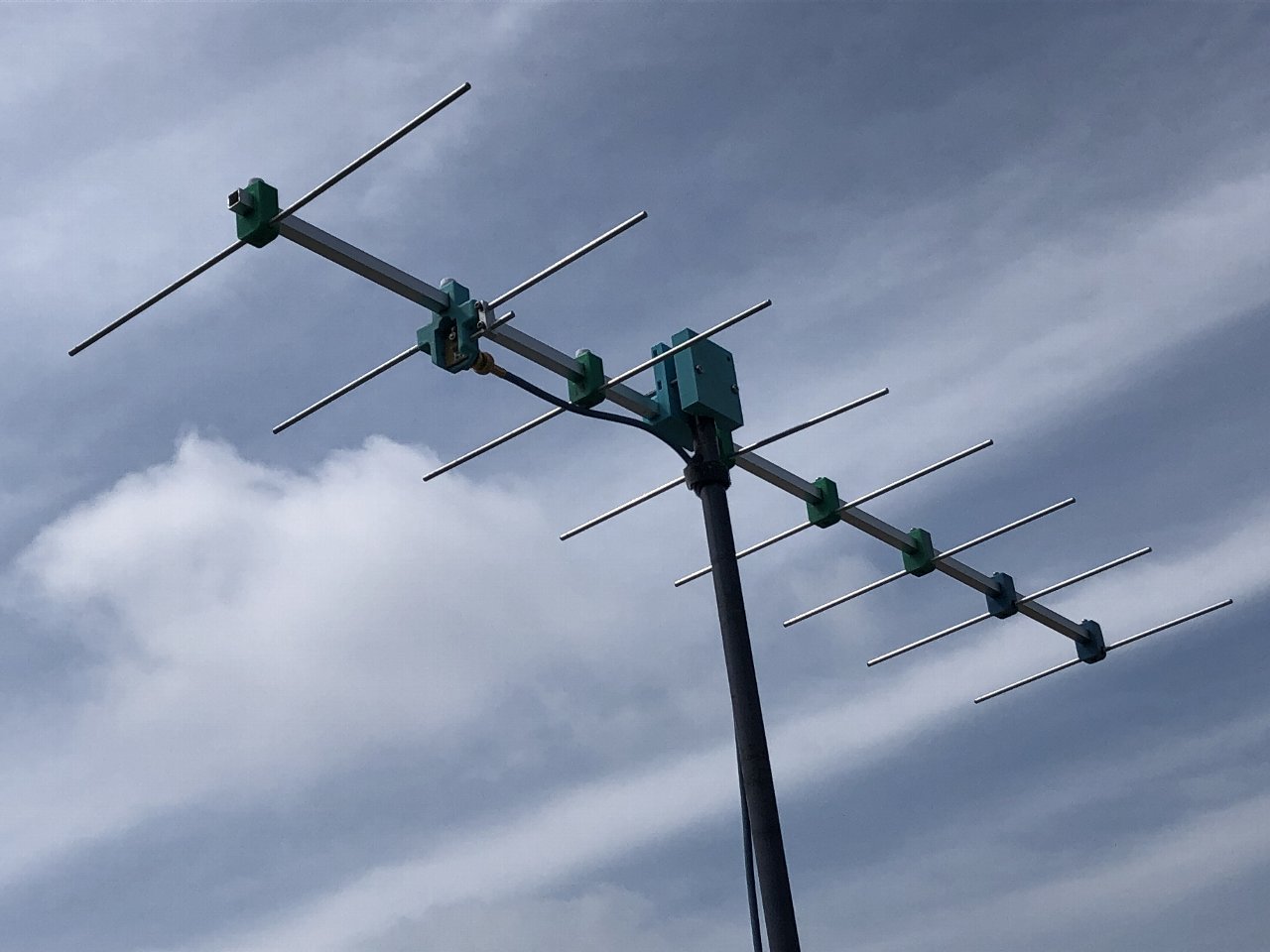
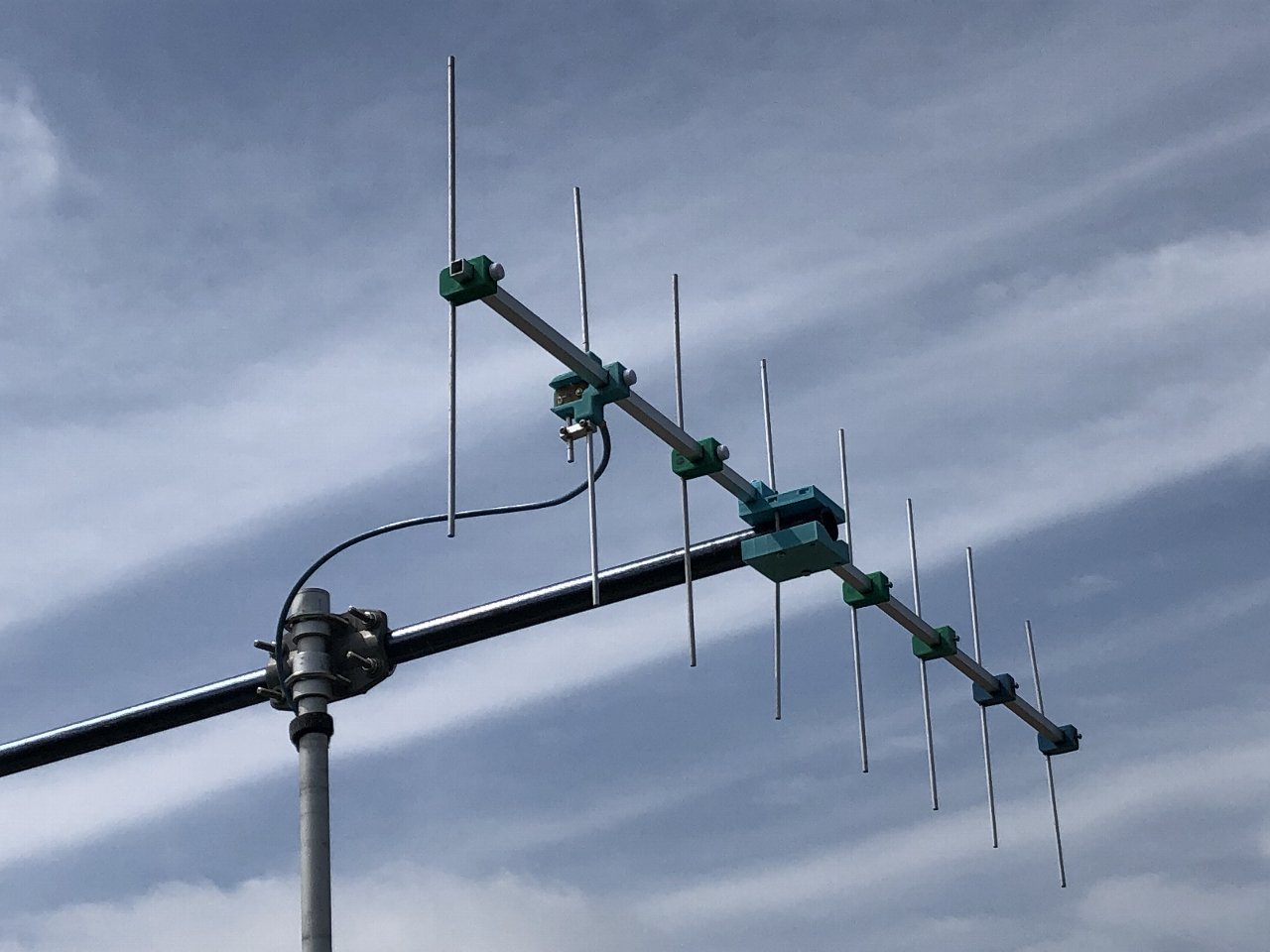
一応完成した430MHz 8エレ
ヤギウダアンテナですが、実際に設置しての使用となるとその設置方法によって性能への影響が考えられます。
すべての設置方法を想定することは難しいのですが、一般的に考えられる方法を想定して、ここではVSWRへの影響がどうなるかを比較してみました。
(当然指向性パターンへの影響もあると想定されますが、VSWRへの影響を抑えれば影響は少ないだろうと判断しています)
今回は、10パターンを測定しました。写真の右側の数値が、
430.02MHz 432.98MHz 438.98MHz VSWRminiの時の周波数/VSWR です。
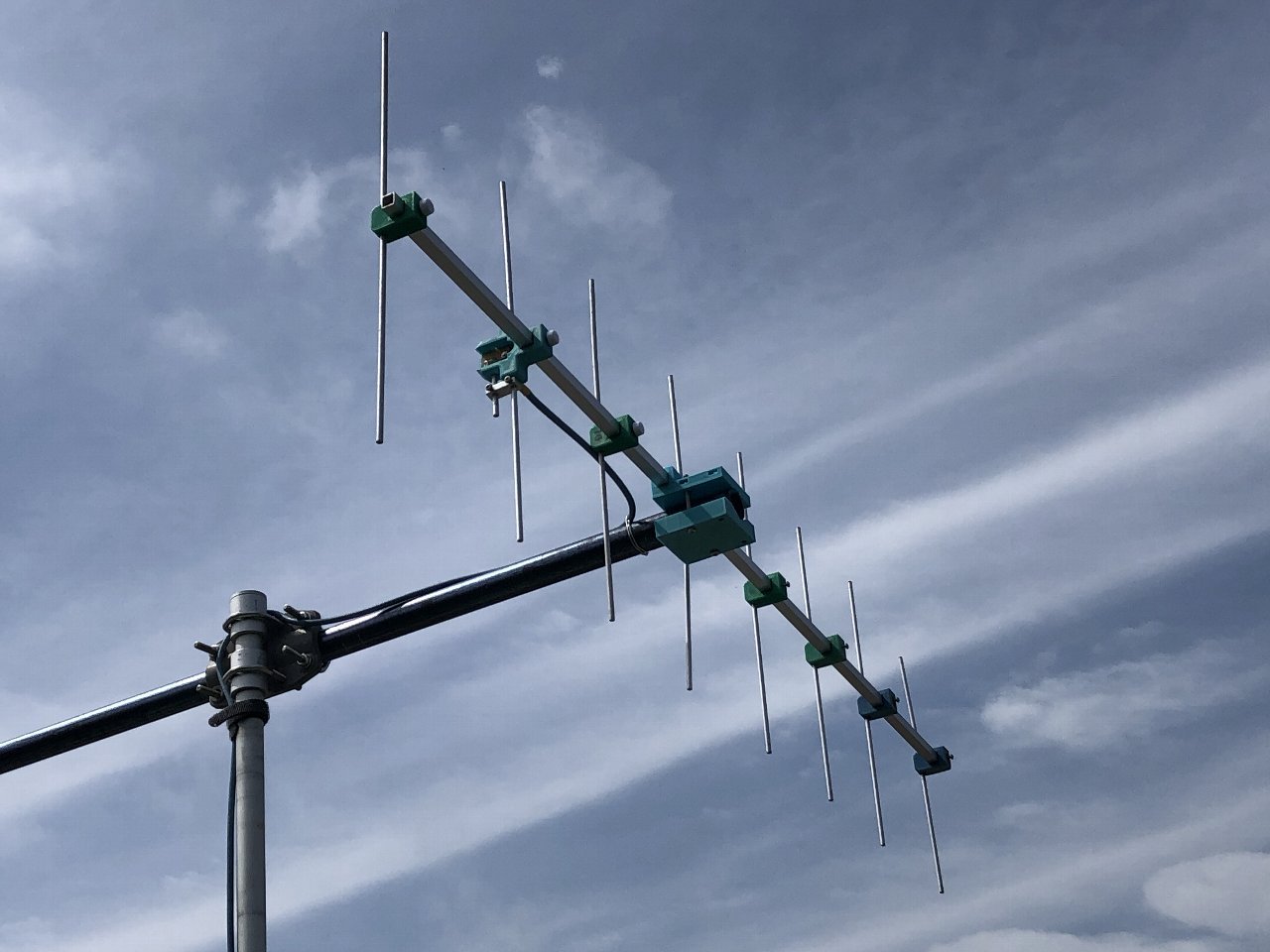
VSWRが極端に悪くなるケースはありませんでしたが、共振点の移動が見られるケースもあり、以下の推奨取付が好ましいと思われます。
結論:樹脂製水平ブームを使用してケーブルはブームから離すことを推奨
NGケース:金属ポールへの直接垂直取付は、共振点への影響を含め推奨されない
※ 樹脂製の水平ブームを使用した場合、メインのポールが金属であってもその影響は軽微である。
水平ブームでの金属ポールとアンテナの距離は、今回約40cmで測定。
金属製の水平ブームでの測定は実施しなかったので影響は不明。
ポールに直接垂直取付をする場合、ポールは樹脂製を使用し、ケーブルはポールから離す方が良い。
②がこのケースですが、共振点が低い位置になっています。(2共振点の可能性もあり影響は不明)
① ファイバーポール 直接垂直取付 ケーブルはポールに沿わせる
 1.15 1.35 1.25 430.18/1.15
1.15 1.35 1.25 430.18/1.15
② ファイバーポール 直接垂直取付 ケーブルはポールから離す
 1.2 1.1 1.45 430.14/1.1
1.2 1.1 1.45 430.14/1.1
③ アルミポール 直接垂直取付 ケーブルはポールから離す
 1.1 1.45 1.3 430.02/1.1
1.1 1.45 1.3 430.02/1.1
④ アルミポール 直接垂直取付 ケーブルはポールに沿わせる
 1.1 1.3 1.3 436.6/1.2
1.1 1.3 1.3 436.6/1.2
⑤ アルミポール 直接水平取付 ケーブルはそのまま垂らす
 1.2 1.15 1.45 433.5/1.15
1.2 1.15 1.45 433.5/1.15
⑥ アルミポール 直接水平取付 ケーブルはポールに沿わす
 1.2 1.15 1.45 433.2/1.15
1.2 1.15 1.45 433.2/1.15
⑦ ファイバーポール 直接水平取付 ケーブルはポールに沿わす
 1.2 1.15 1.45 433.18/1.15
1.2 1.15 1.45 433.18/1.15
⑧ アルミポール 水平ブーム使用垂直取付 ケーブルはブームから離す
 1.25 1.1 1.5 433.16/1.1
1.25 1.1 1.5 433.16/1.1
⑨ アルミポール 水平ブーム使用垂直取付 ケーブルはブームに沿わす
 1.2 1.1 1.5 433.10/1.1
1.2 1.1 1.5 433.10/1.1
⑩ ファイバーポール 水平ブーム使用垂直取付 ケーブルはブームから離す
 1.2 1.1 1.5 433.10/1.1
1.2 1.1 1.5 433.10/1.1
すべての設置方法を想定することは難しいのですが、一般的に考えられる方法を想定して、ここではVSWRへの影響がどうなるかを比較してみました。
(当然指向性パターンへの影響もあると想定されますが、VSWRへの影響を抑えれば影響は少ないだろうと判断しています)
今回は、10パターンを測定しました。写真の右側の数値が、
430.02MHz 432.98MHz 438.98MHz VSWRminiの時の周波数/VSWR です。
VSWRが極端に悪くなるケースはありませんでしたが、共振点の移動が見られるケースもあり、以下の推奨取付が好ましいと思われます。
結論:樹脂製水平ブームを使用してケーブルはブームから離すことを推奨
NGケース:金属ポールへの直接垂直取付は、共振点への影響を含め推奨されない
※ 樹脂製の水平ブームを使用した場合、メインのポールが金属であってもその影響は軽微である。
水平ブームでの金属ポールとアンテナの距離は、今回約40cmで測定。
金属製の水平ブームでの測定は実施しなかったので影響は不明。
ポールに直接垂直取付をする場合、ポールは樹脂製を使用し、ケーブルはポールから離す方が良い。
②がこのケースですが、共振点が低い位置になっています。(2共振点の可能性もあり影響は不明)
① ファイバーポール 直接垂直取付 ケーブルはポールに沿わせる
 1.15 1.35 1.25 430.18/1.15
1.15 1.35 1.25 430.18/1.15② ファイバーポール 直接垂直取付 ケーブルはポールから離す
 1.2 1.1 1.45 430.14/1.1
1.2 1.1 1.45 430.14/1.1③ アルミポール 直接垂直取付 ケーブルはポールから離す
 1.1 1.45 1.3 430.02/1.1
1.1 1.45 1.3 430.02/1.1④ アルミポール 直接垂直取付 ケーブルはポールに沿わせる
 1.1 1.3 1.3 436.6/1.2
1.1 1.3 1.3 436.6/1.2⑤ アルミポール 直接水平取付 ケーブルはそのまま垂らす
 1.2 1.15 1.45 433.5/1.15
1.2 1.15 1.45 433.5/1.15⑥ アルミポール 直接水平取付 ケーブルはポールに沿わす
 1.2 1.15 1.45 433.2/1.15
1.2 1.15 1.45 433.2/1.15⑦ ファイバーポール 直接水平取付 ケーブルはポールに沿わす
 1.2 1.15 1.45 433.18/1.15
1.2 1.15 1.45 433.18/1.15⑧ アルミポール 水平ブーム使用垂直取付 ケーブルはブームから離す
 1.25 1.1 1.5 433.16/1.1
1.25 1.1 1.5 433.16/1.1⑨ アルミポール 水平ブーム使用垂直取付 ケーブルはブームに沿わす
 1.2 1.1 1.5 433.10/1.1
1.2 1.1 1.5 433.10/1.1⑩ ファイバーポール 水平ブーム使用垂直取付 ケーブルはブームから離す
 1.2 1.1 1.5 433.10/1.1
430MHz 8エレ 八木宇田アンテナ完成!
(2022/8/3 18:10:07)
1.2 1.1 1.5 433.10/1.1
430MHz 8エレ 八木宇田アンテナ完成!
(2022/8/3 18:10:07)

構想から試作品まで相当な時間が経過し、その試作品から更に10か月あまりが経過してやっと完成しました。
試作品の製作経過は以下のBLOGになります。
http://blog.toshnet.com/article/189101335.html
当局自身が気が多くすぐに色々なことをやりたくなってしまって、なかなか完結しないことに大きな要因があるのですが、このアンテナに関しては JK1LSE OMに設計・監修をお願いし、成果が得られました。
普通なら、そこから頒布に向けた準備が可能なのですが、これ以外の頒布品の対応も増えてきてなかなか準備が整わないまま、またしても時間が経過してしまいました。
と言っても放っておくわけにはいかないので JK1LSE OM にも相談し、 設計・監修のみならず、主要部品の製作、性能確認 も行っていただけることになり、やっと前進することになりました。
OM殿のサイトは、「木工 Pocky」さんなのですが、今回は木工ではないものの製作、性能確認までをお願いするので「Pocky工房」といったところでしょうか!?(ご本人の承諾は得ていません)
さて、本題に入って、今回は430MHz 8エレからスタートすることにし、材料を手配して数台(5台)を先行試作し、バラつきを含めて前回試作の性能が得られているのかの確認を実施しました。
性能といっても、メーカーではないので正確な性能を測定する環境はありません。
今回も、前回の試作で実施した、 SWRの測定 、最大限実施できる 指向性パターンの測定 、 メーカー製品と比較した相対利得 の確認を、当局手元に送っていただいた4台(1台はOM殿の手元に原器として保管)について実施しました。
この4台のバラツキが大きくなく所望の性能範囲にあるならば、同じものを頒布することが可能になります。
結論 、今回の4台については SWR、パターン図、相対利得ともにバラツキが非常に少なく 、今後同じものを製作し 頒布が可能と判断 できました。
まず、VSWRです。測定は、6m RG-58Uケーブル+IC-705のSWR表示値です。
実際の運用に近い条件で、Rigから見たSWRとしてみました。(JK1LSE 測定)
クリックして拡大してみてください。
結果は、運用帯域においてほぼ1.0と十分な性能となっています。
当局の環境においても、5m RG-58U+IC-9700のSWR表示値においても同等の結果が得られました。
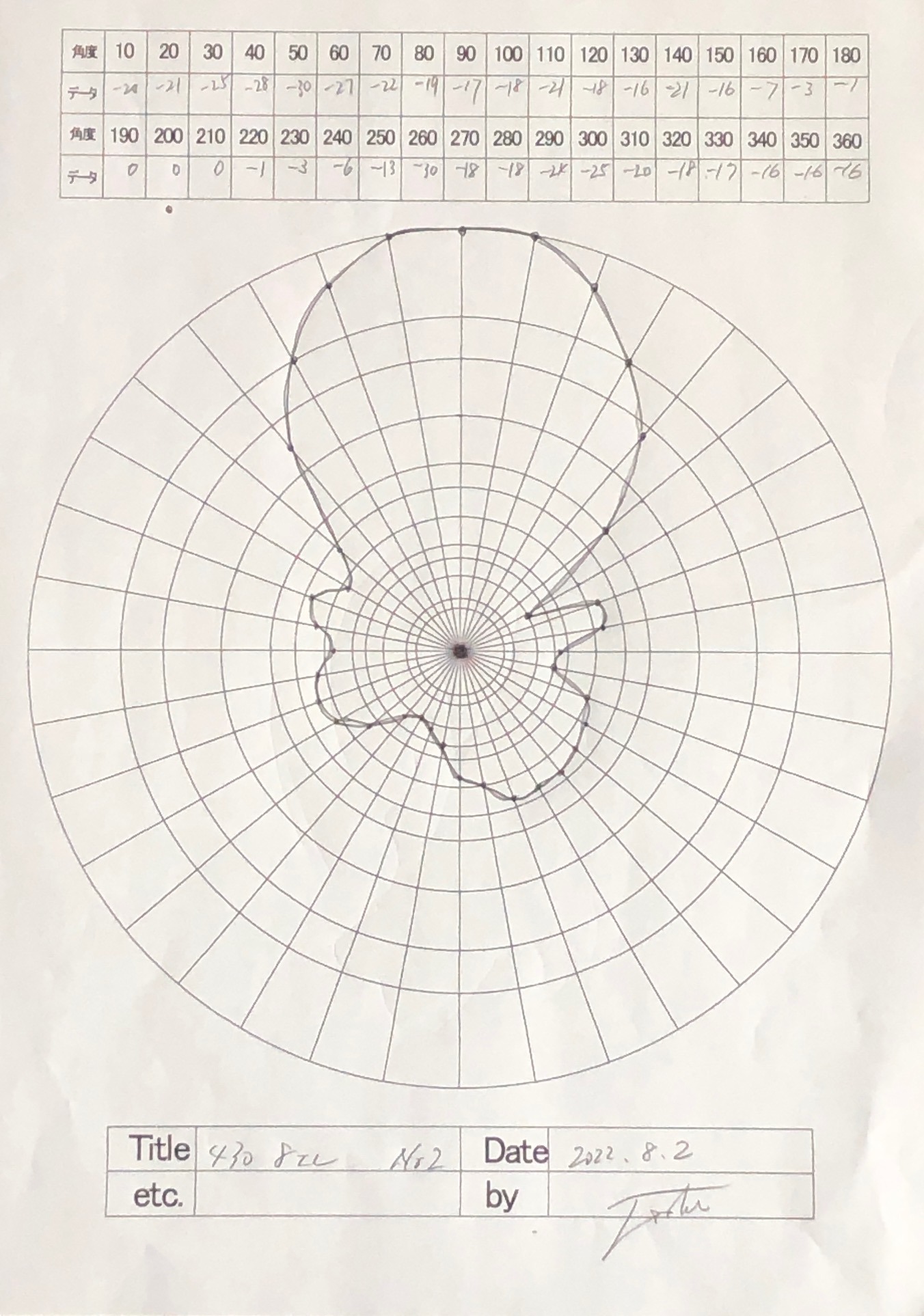
次に、パターン図です。測定は当局のマンションのオープンベランダにおいて、
送受信アンテナ間隔 8.5m、アンテナ高さ(ベランダ床面から)3.8mで実施しました。
送信Rig:IC-9700(5W) アンテナ:SG9500
受信Rig(自作電界強度計(AD8307使用)) アンテナ:今回試作品
測定様子は、 http://blog.toshnet.com/article/189101335.html 参照ください。

No1 No2
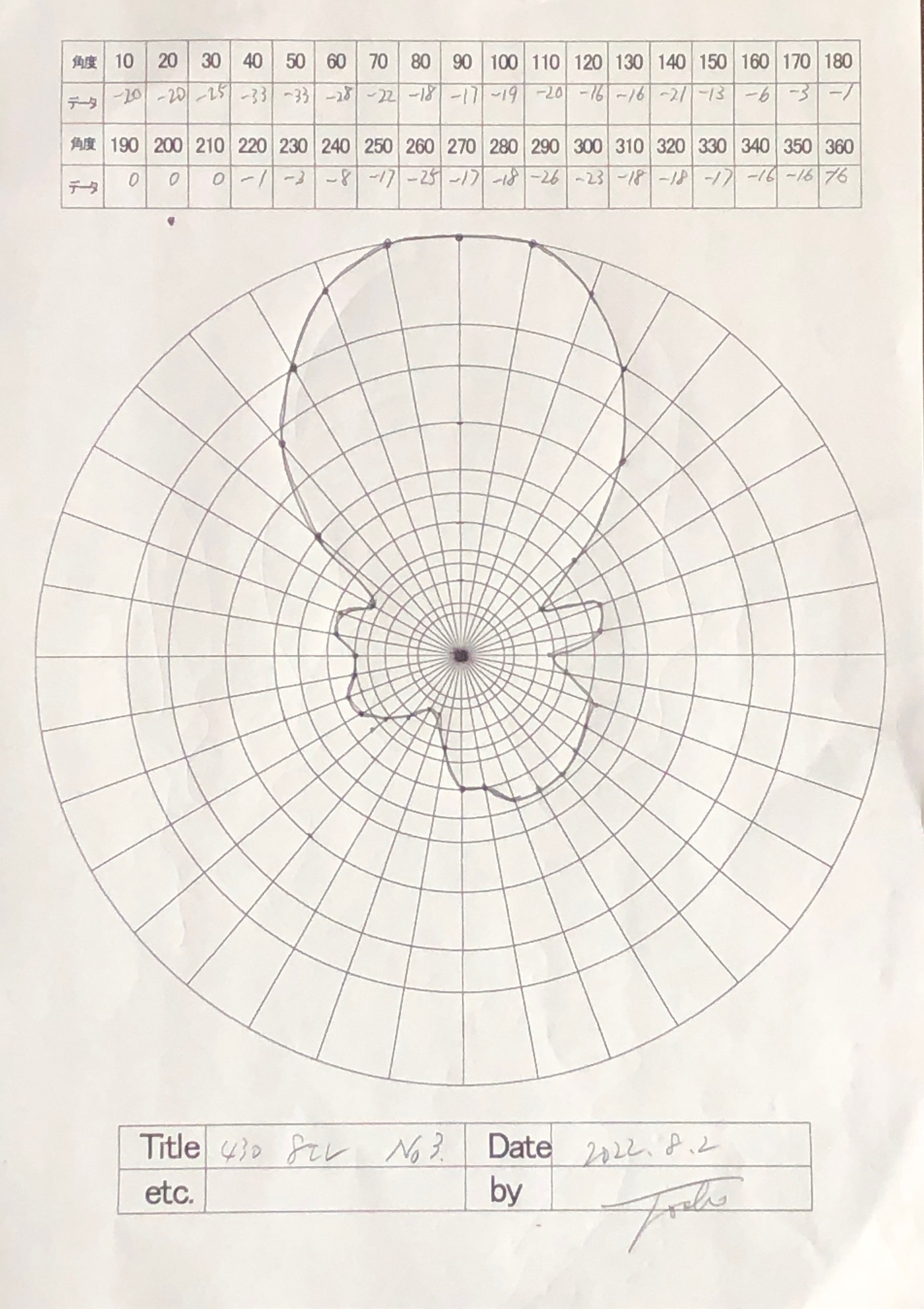
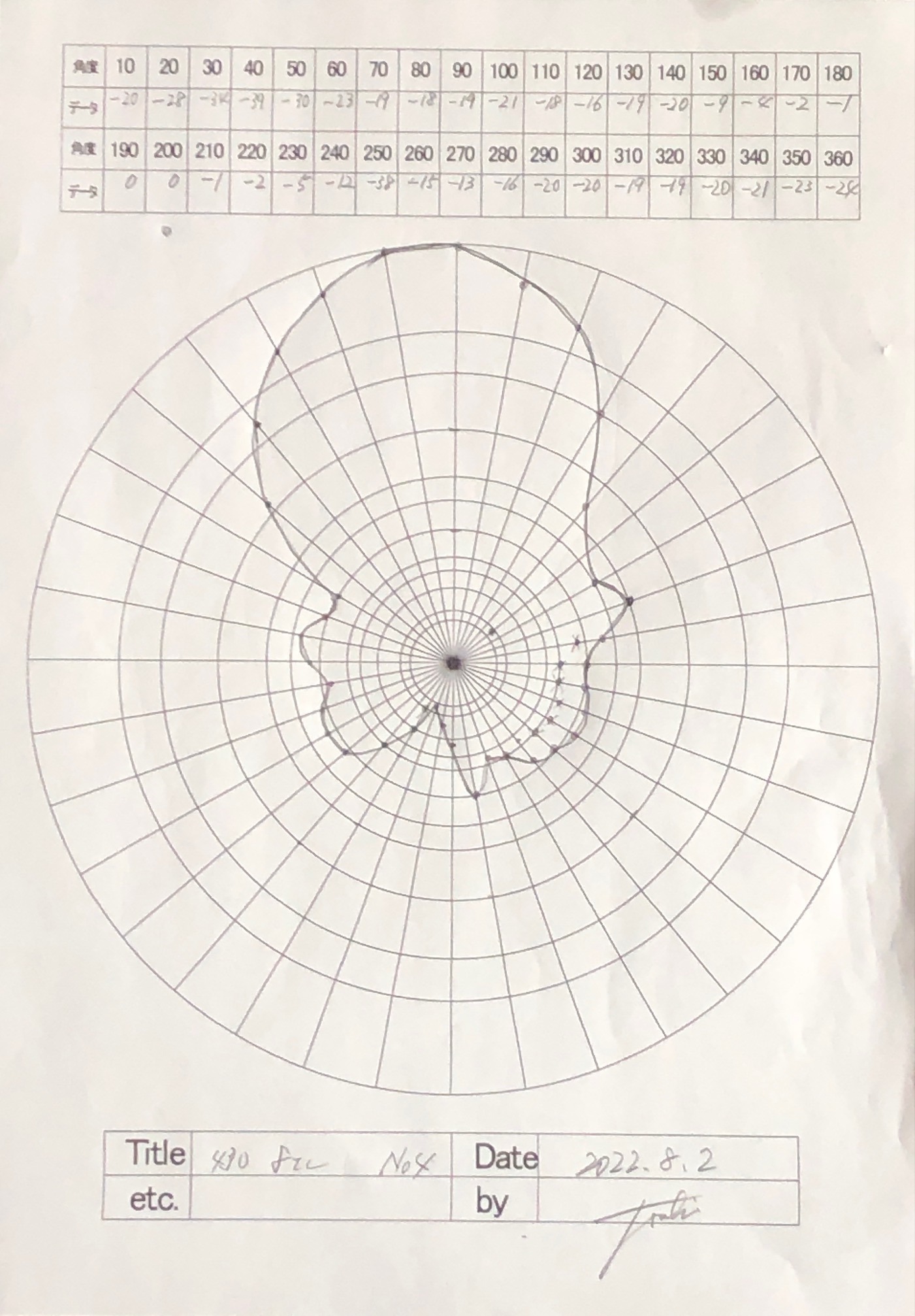
No3 No4
パターン図は、No1~No3が酷似しています。No4は若干違いますが、傾向は似ているといっていいでしょう!
メインロープの受信レベルは、いずれも0dBとなっており、FB比は、20dBが確保されています。
パターン図、ゲイン、FB比ともにバラツキは少ないといえると思います。

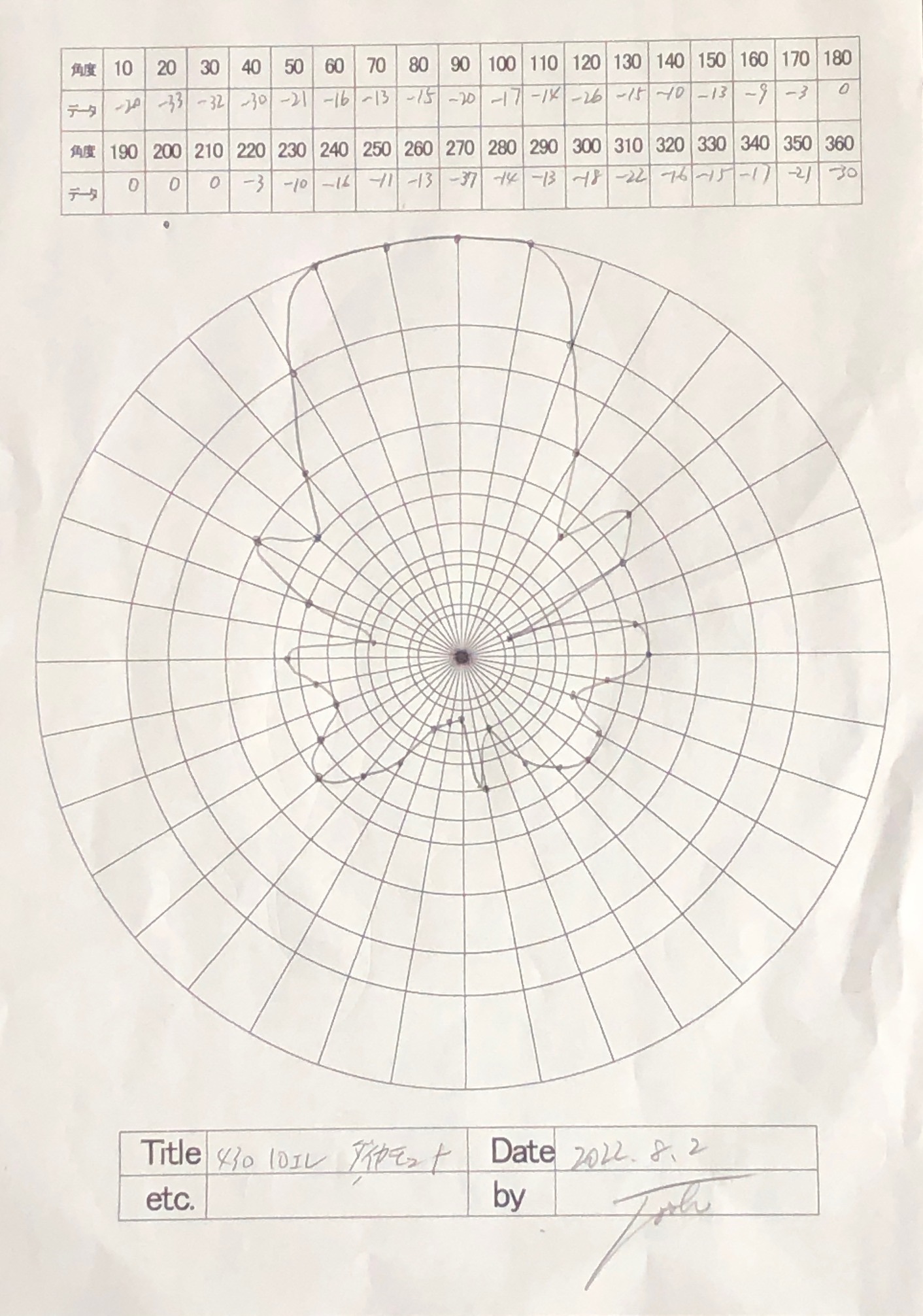
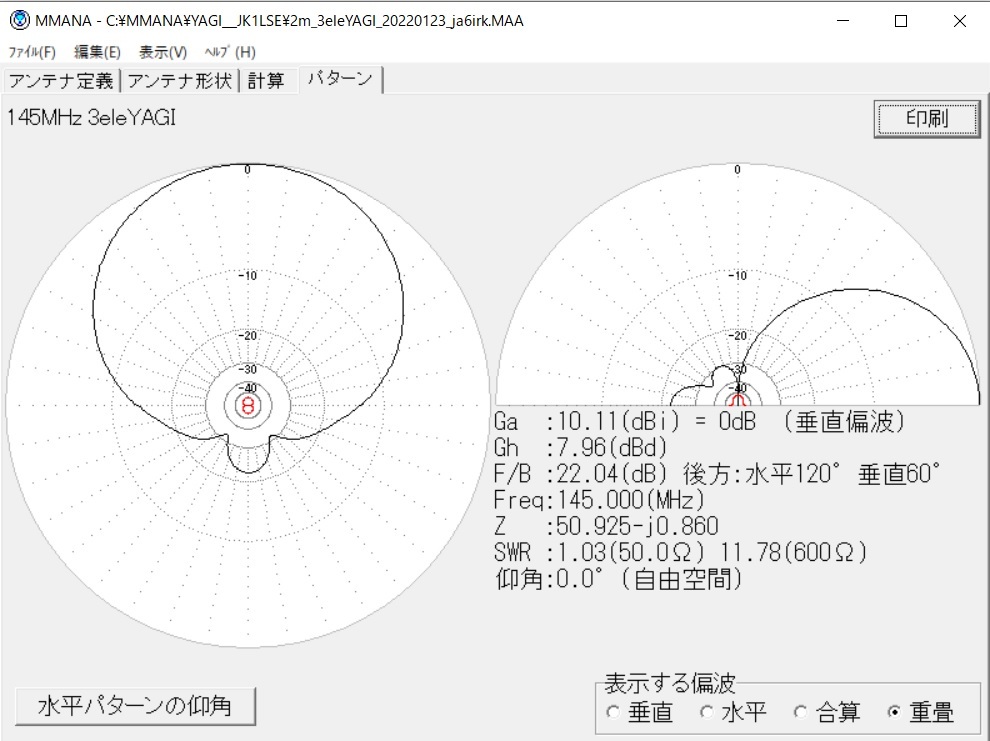
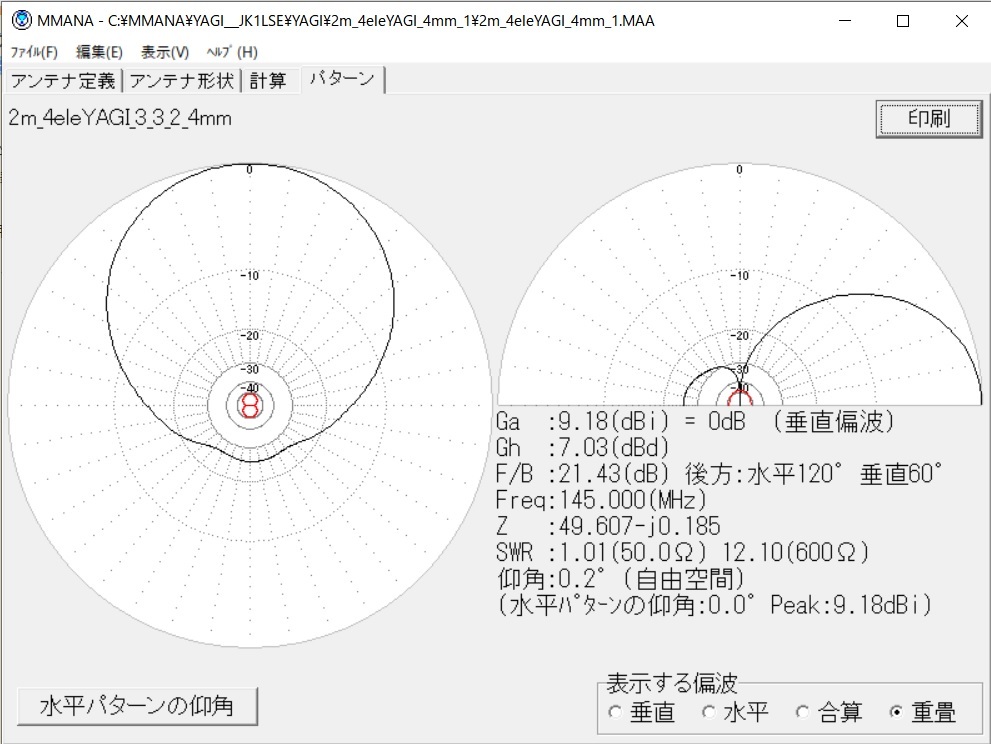
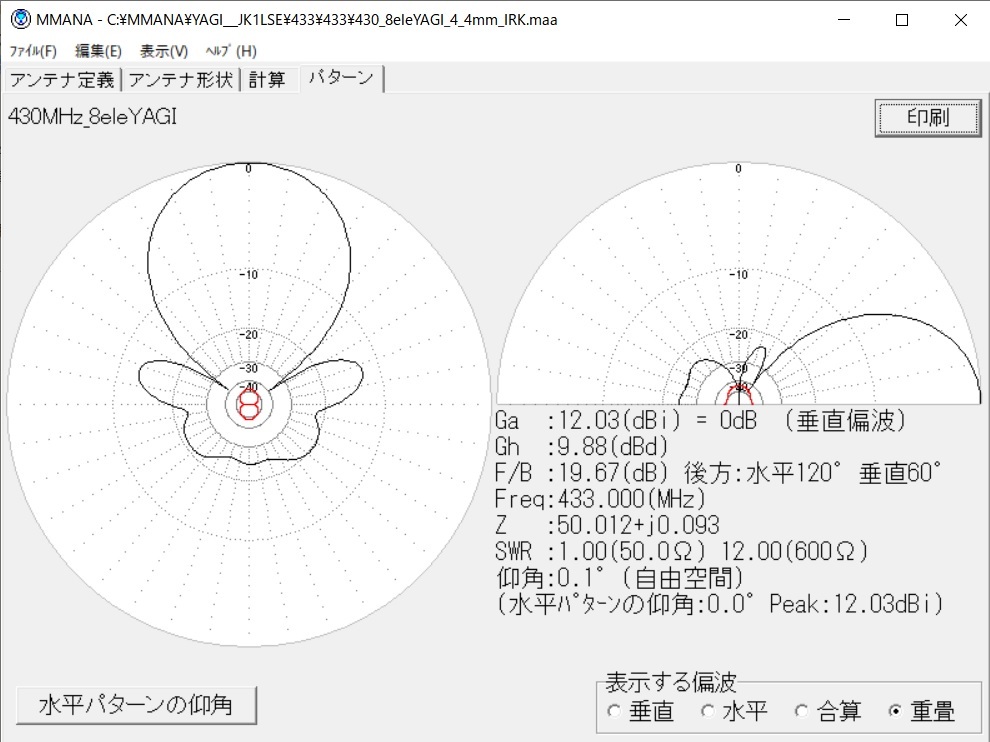
このパターン図は、前回試作時の設計データでMMANAによるものです。
実測は10度おきの測定のため、デイップとなるパターンは比較できませんが、サイドロープはシミュレーションより抑えられているように見えます。
今回の測定は、前回試作の時と違って、送受信アンテナの給電点高さを合わせたので、比較的正確なパターンが測定できたのではないかと思っております。
肝心の絶対ゲインですが、測定の手段がないため今回もダイヤモンド製10エレ(カタログゲイン:10.96dB)と比較してみました。
メインロープが潰れたような形になっていますが、送信パワーを上げると10dB程度までは受信レベルが上がるので、サチっているわけではありません。
測定が1dBステップなので四捨五入の関係で±0.5dBの誤差はあるかと思います。
こちらは、左右対称なパターン図になっていますが、サイドロープのレベルは比較的高いです。メインロープは狭くなっているように見えます。
ゲイン比較ですが、同じ条件でメインロープの最大値が同じレベルで測定されていますので、ほぼ同じゲインであると想定されます。
MMANAのシミュレーション値では、約1dB低い(8エレと10エレの差)値になっていますが、ほぼ同等となりました。先の記述通り1dBステップの四捨五入の関係で±0.5dBの誤差があり得ますが、結果としては目標通りの値が得られたといえるでしょう。
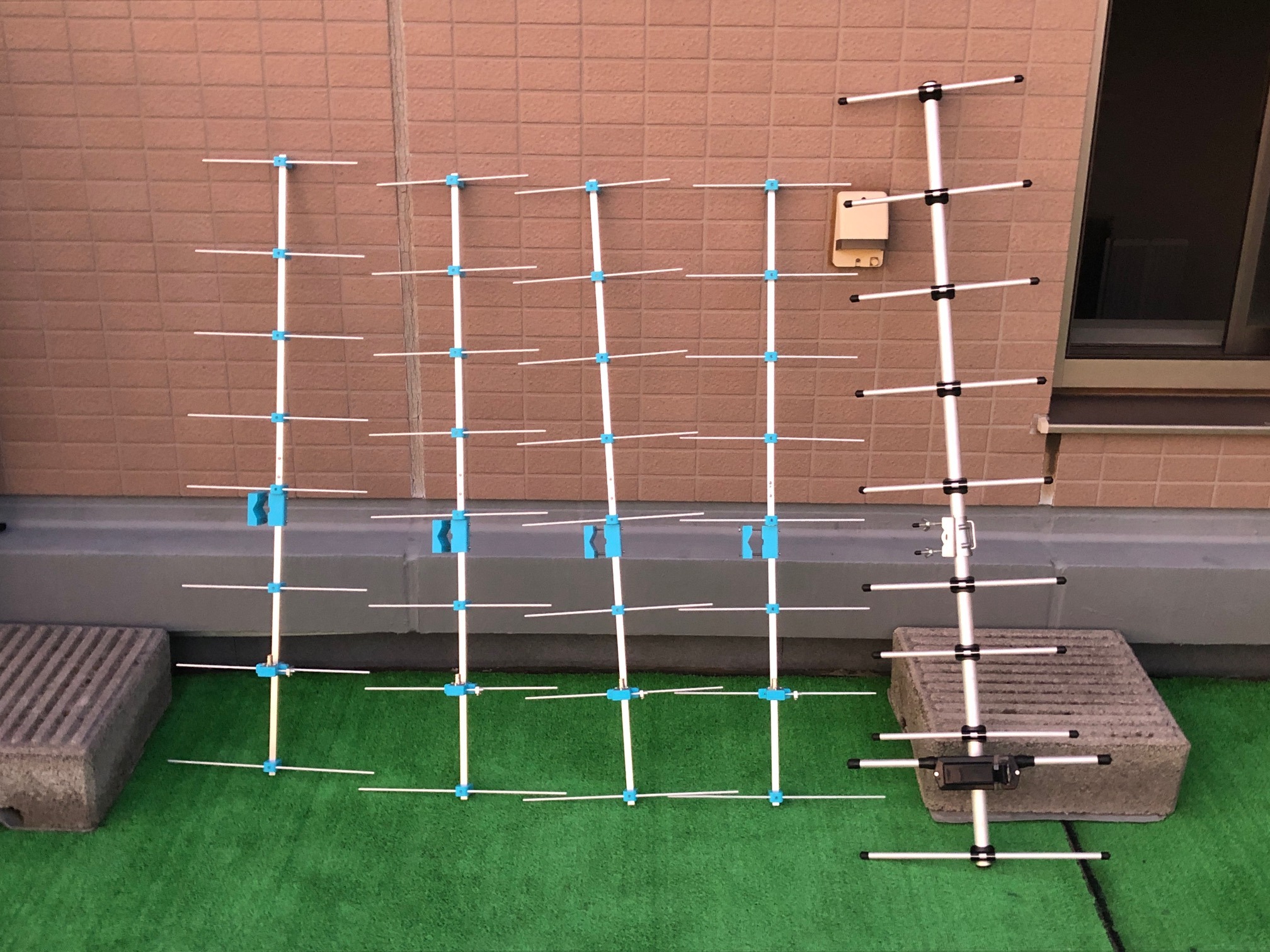
今回測定の8エレ 4台と 比較したダイヤモンド製10エレ
アンテナの自作を行う上で、最近ではMMANAを使用してシミュレーションをしてから作るというケースが多いとは思いますが、その結果として実測を行い、シミュレーションとの比較において確からしさの確認まで実施するケースは少ないかと思います。
前回試作で、実測を行い確からしさの確認までは行いましたが、今回、同じものを複数台製作し、バラつきまでを見てみて、同じものが製作できるところまでが確認できました。
次は製作ロットが違っても同じバラツキ範囲で作れるかを、測定してみたいと思います。
今回作った5台の内、保管分2台を除いた 3台は、データ付きでハムフェアにおいて頒布 させていただく予定です。ご興味のある方は、ブース C-49 AKCブースへおいでください。
ただし、当局は 2日目(8月21日(日))のみ となりますので、ご注意ください。
詳細は、 http://pocke.tech/sell/ をご覧ください。(これから順次情報アップします)
何とか頒布までたどり着けそうなところまで絶大なるご支援をいただきました JK1LSE OMには心より感謝いたします。
PockeTATOR mini Ver1.0
(2022/7/21 22:34:17)

先日、回転動作のみに機能を絞った Pocke TATOR Jr.を開発し、初回頒布もさせていただきました。
これはこれで当初の目的は達成できたのですが、じっと眺めているともう少し小型化できるのではないかと思うようになり、重量的にも、直接マストに被せて簡単に固定できる構造としたことによって、初代 Pocke TATORⅡ と比較すると200gほど重くなっており、もう少し軽くしたいなあ!という気持ちになってきました。
現在、構造の基本となる部分にはVP50という塩ビ管を使用していますが、モーターサイズからVP40管でも入れられるのではないかと思い、またまた検討を始めてみました。
回転力は落とさないように、使用するギアモーターは同じものを使用します。
結果として、VP40管を使用し、アルミポールの固定用に使用している異形ジョイントも50→25から、40→25と小型になり、結果的に200gほど軽くすることができました。
下の写真は。初代 Pocke TATORⅡ、Pocke TATOR Jr. との比較です。かなりスリムになったことがわかります。

マストへの取り付けは、Jr.と同じくマストの上から被せて、ネジで固定する方式です。

名前は Pocke TATOR mini とすることにしました。
コントローラーは、Pocke TATOR Jr.と同じものが使用できます。
モーターは、これまでと同じものを使用しているため、2kg 以下の小型アンテナなら回すことができます。
いつもと同じですが、ダイヤモンド製 144MHz 5エレ、430MHz 10エレを並べて回転させてみました。
再生できない場合、ダウンロードは🎥 こちら
アンテナの方向が視認できる、ベランダや移動運用などでは使えるのではないかと思います。
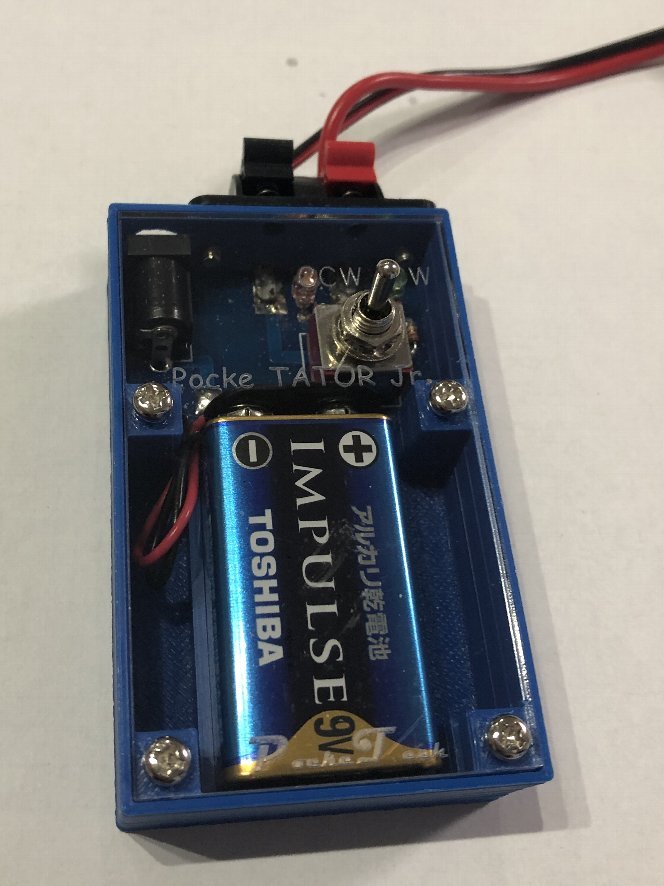
コントローラーは、本体の2端子に12V(9V電池でも可)を加えて、逆接すれば反転するので、好きな形のスイッチで作られてもいいかと思ってます。
またまたコロナが急激に増えてどうなるか予断を許さないですが、ハムフェアには何台か持ち込めればと考えています。
60サイズで送れるようにするには、もう少しコンパクトにする必要がありますが。
Pocke TATOR Jr.
(2022/5/27 16:47:54)

簡易型小型ローテーターであるPocke TATORはおかげ様で沢山の局長さんにお使いいただいており、機能も単にアンテナを回転させる機能から、衛星追尾にも対応し、また、Mac Dopplerという衛星通信リグコントローラーに内蔵されたローテーター制御にも対応してきました。
衛星追尾の視点からは、仰角ローテーター機能もプロトまではできているものの未だに頒布できていない状況ではありますが、一方では、移動運用や、ベランダで視認できる位置でのアンテナ回転においては、回転角度の認識など必要なく、単純に回すことができればいいので、シンプルなものが欲しいというご要求もありました。
昨今の半導体不足の状況で、コントローラーに使用しているマイコンやモータードライバ等々(本体に使用しているギアモーターも同じ状況ですが)、価格は2倍、3倍に高騰し、調達も制限された中で、これまでも不定期、少量であったとは言え、今後作っていけるかどうかも心配になってきました。
勿論、部品が入手できる間は作っていこうと考えておりますが、目視で単純に右回転、左回転だけの機能であればマイコンやモータードライバーIC等は必要ありませんので、ご要望にも対応して、シンプルローテーターのプロトタイプを作ってみました。

構造的には、基本はこれまでのPocke TATORと同じですが、マストへの取り付けは、単純にマストの上からかぶせて横の二つの蝶ネジを締めて終わりという方法です。
ドライブするギアモーターはこれまでと同じものを使用していますので、駆動できるアンテナサイズや重さなどは同じです。
回転角度表示などは必要ありませんので、本体はモーターのみでセンサーなどは搭載していません。
その分、スペースに余裕がありますので、使用するパイプサイズを小さくしました。
制御線もモーター用の2線のみなので、一般的にどこにでも売っているACケーブル(平行ビニル線)、スピーカーケーブルなどを使用することができます。
電流も12Vで150mAも流れないので、細いもので十分だと思います。インターフォンなどに使用されているものでも大丈夫でしょう。
ケーブルを接続するコネクターも、シンプルにスピーカー端子などに使用されているものを使いました。
押して線を入れるだけなので接続方法もシンプルです。
今回、回転コントローラーは、Pocke TATORの取説で説明しているシンプルコントローラーを使用して実験しました。

変わり映えしませんが、ベランダの手すりに取り付けたBSアンテナ用のマストに、本体を載せて、いつも実験で回しているダイヤモンド製の144MHz 5エレ、430MHz 10エレを回転させています。
再生できない場合、ダウンロードは🎥 こちら
電源は、006P 9V電池を使用していますが、回転力はあるのでこれくらいなら何とか回すことができております。モーターは12V仕様で2.5rpm(負荷によりスピードは変わります)のものです。


名前は、Pocke TATORのシンプル版なので Pocke TATOR Jr.としました。
PockeTATOR衛星追尾Mac対応
(2022/5/17 15:07:23)
先日、簡易型ローテーター Pocke TATORの機能・性能改善を実施し、紹介しましたが、この機能のうちの衛星自動追尾については、Windowsでの対応しかできていませんでした。
しかし、衛星通信用のリグコントローラとしてMacのアプリを使用しておられる局長さんも多くおられ、Pocke TATORのユーザーさんにもおられました。
当局は、Macも使用していますが主はWindowsのため、Windowsでのコントロールとなっておりましたが、機能性能改善もひと段落したので、Mac対応も検討することにしました。
とはいえ、どんなアプリがるのかも知りません。
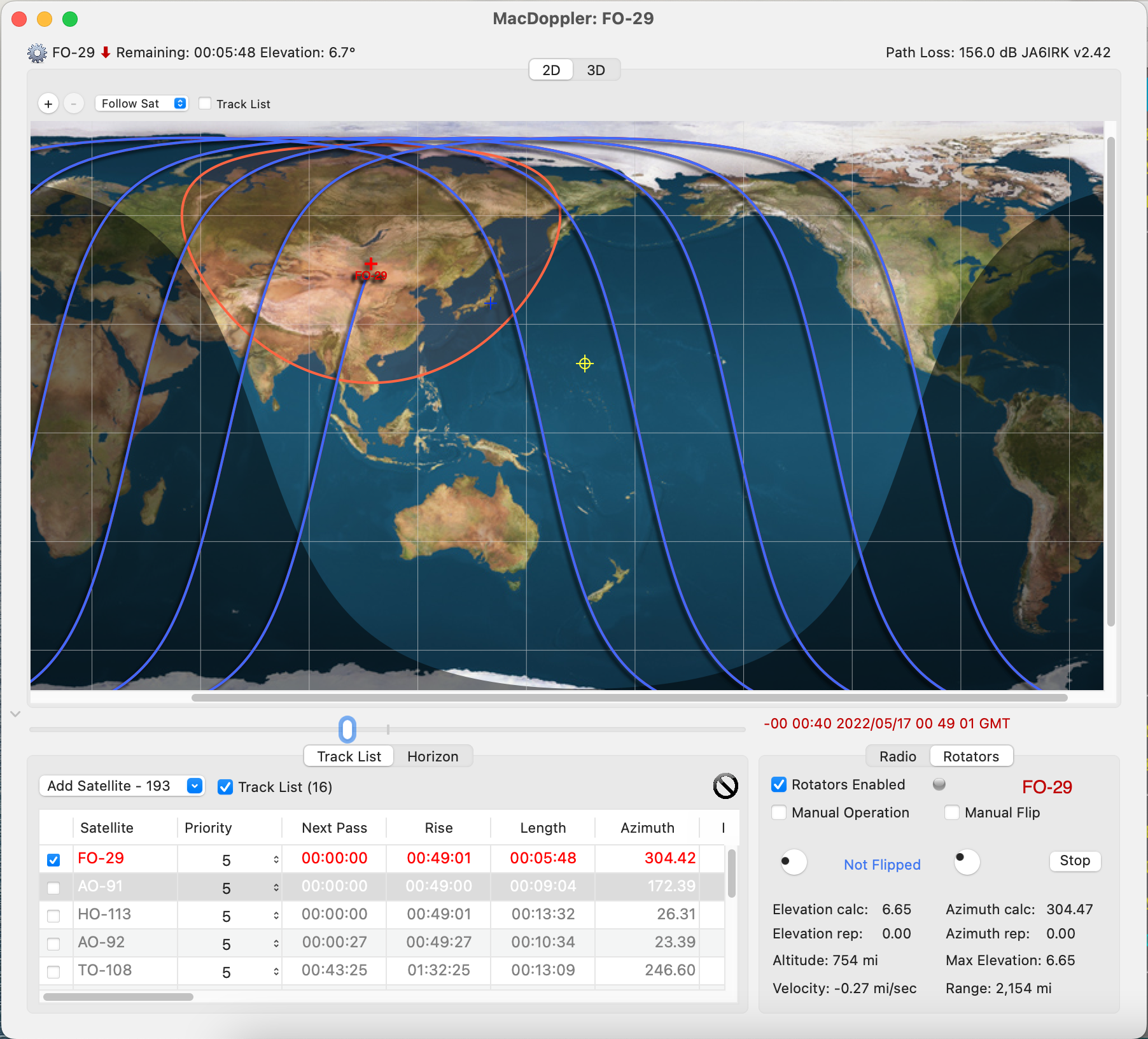
その道の方々にお聞きすると、MacDopplerなるものを使用されている局長さんが多いようでした。
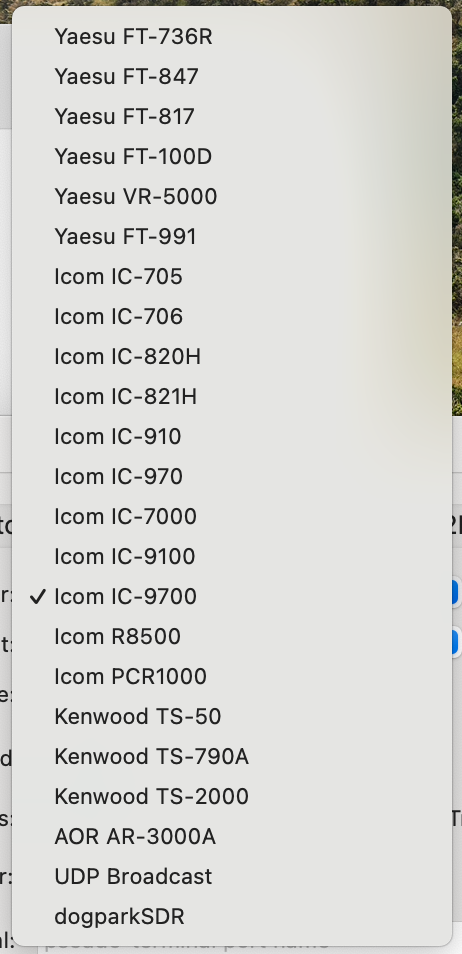
調べてみると、1997年から存在している老舗のアプリのようで、今でもバージョンアップが行われており、対応リグとして 最新のIC-9700もできるようになっています。
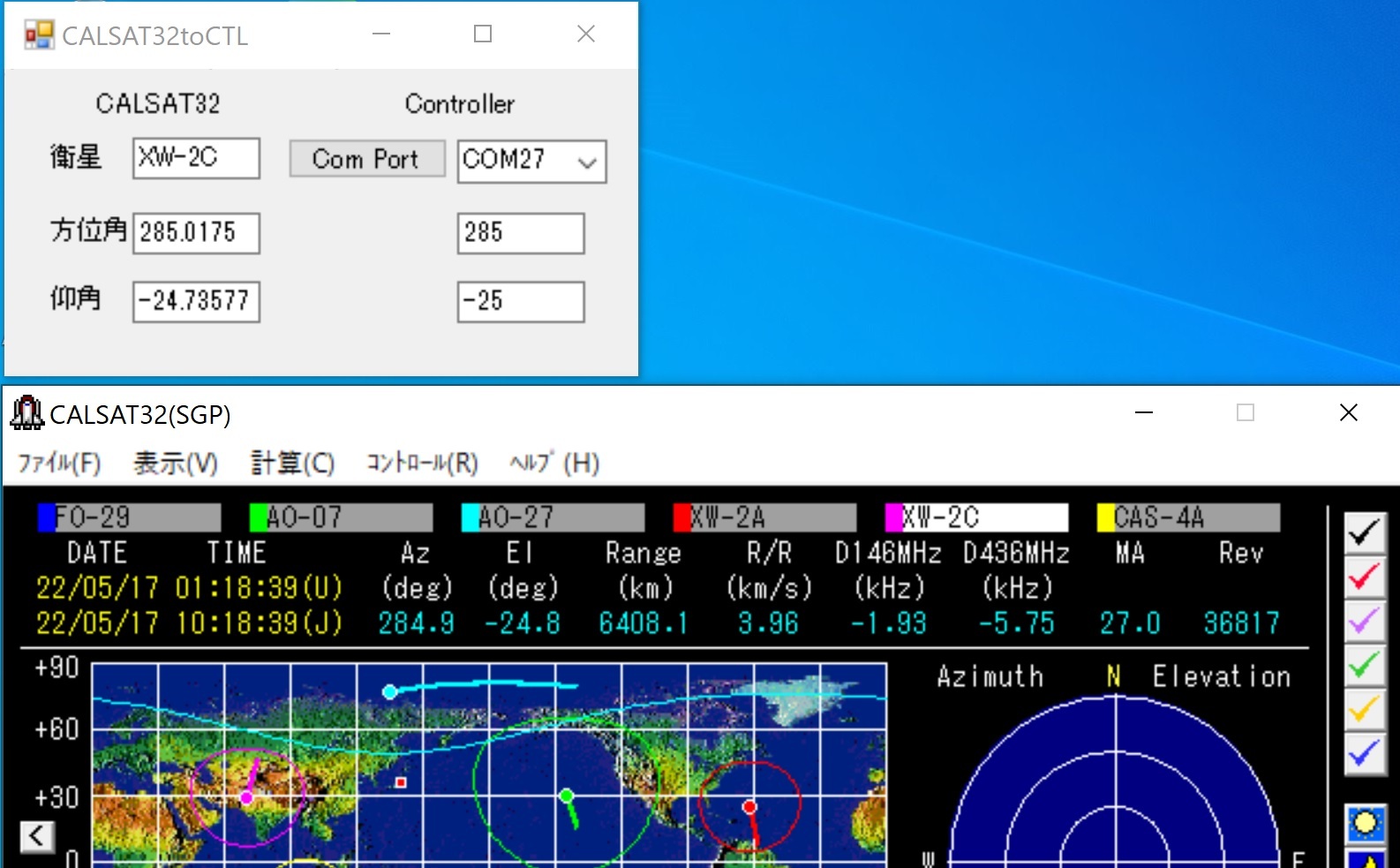
Windowsの場合、Pocke TATORの制御には、衛星軌道アプリであるCalsat32を使用させていただき、これが吐き出している衛星名、方向角、仰角のデータをPocke TATORコントローラーが制御できるように変換する中間アプリを自作して実現していました。
さすがにMacのアプリを作る自信は全くなく、何とか実現の方法がないか探ることから始めました。
結論は、簡単で MacDopplerにはローターコントローラー機能が付属していました。
世界にある色々なローテーターに対応しているようです。
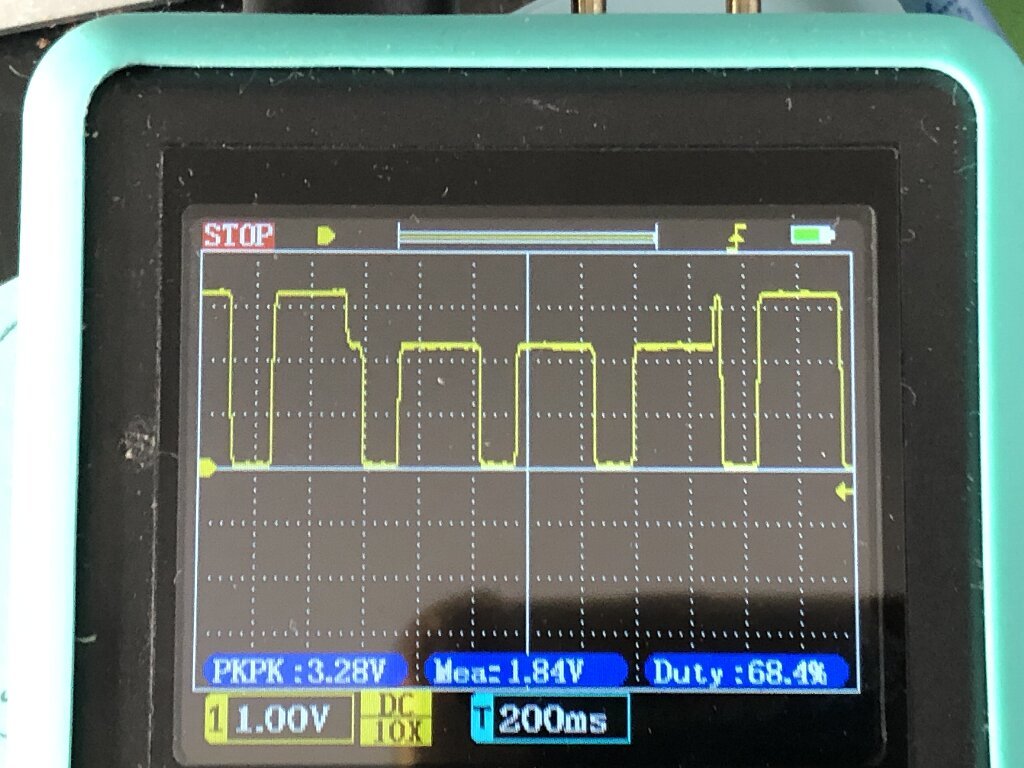
それぞれがどのような信号を使って制御しているのかの情報が少ないのですが、実際に信号の中身を観測して使えそうなものを選択することにしました。
条件はCOMポートを使用したシリアル通信で 最低 方向角が読める方式 です。
当局がダウンロードして使用している MacDoppler ver2.42では、20種類のローテーターが選択できるようになっています。
まず、この中から使えそうなものを選択するわけですが、半分くらいは使えそうなシリアル信号が出ており、Windowsで作った中間アプリを作る必要はないことがわかり、ほっとしました。
その代わり、出力される信号が自作の中間アプリ Calsat32toCTLと全く同じものがあるはずもなく、PockeTATORコントローラーの制御信号の読み込み処理ソフトは改造が必要となりました。
まず、シリアルデータの読み込みの方法ですが、MacにUSBシリアルモジュールを接続して、WindowsPCにもUSBシリアルモジュールを接続して、TeraTermアプリでデータの内容を確認する方法をとりました。
Macに接続したUSBシリアルモジュールがプラグアンドプレイで何もせず認識してくれたのはよかったです。
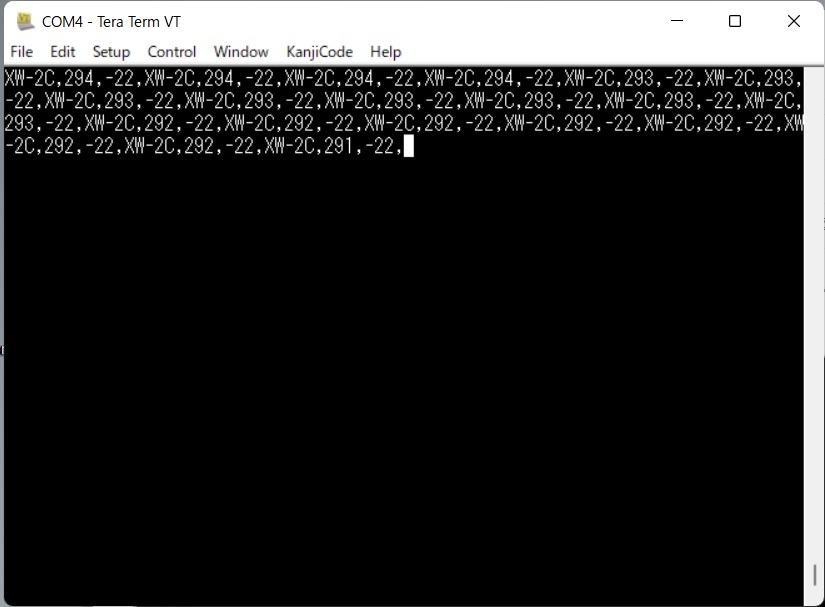
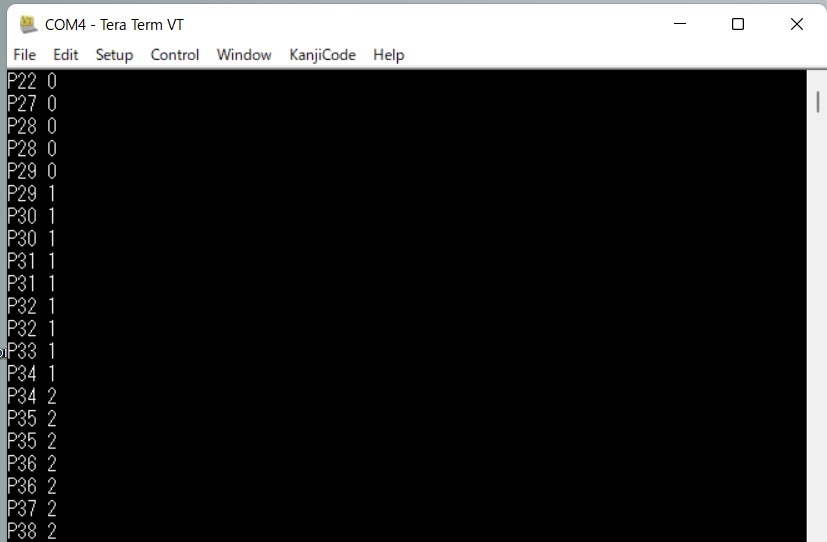
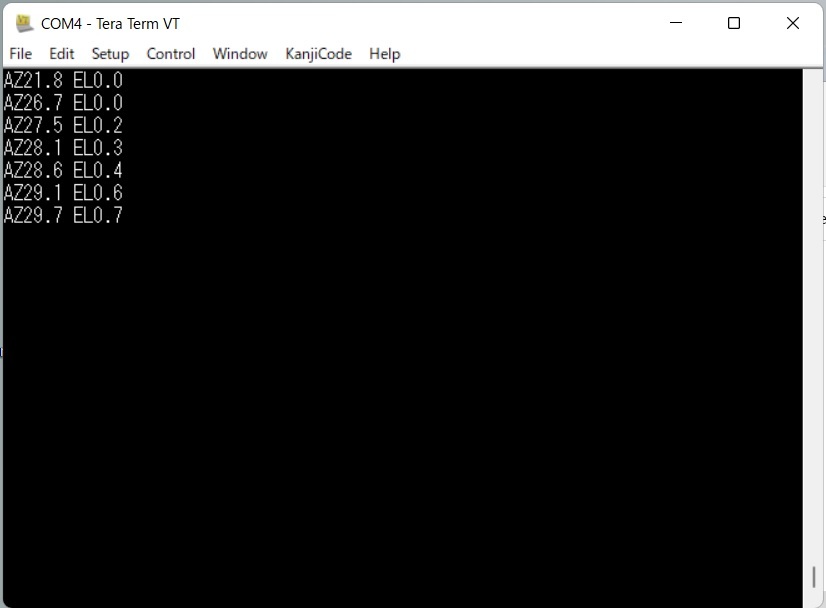
Windows用Calsat32tCTLデータ 採用したSatELのデータ
AutoTrackerのデータ EasyComのデータ
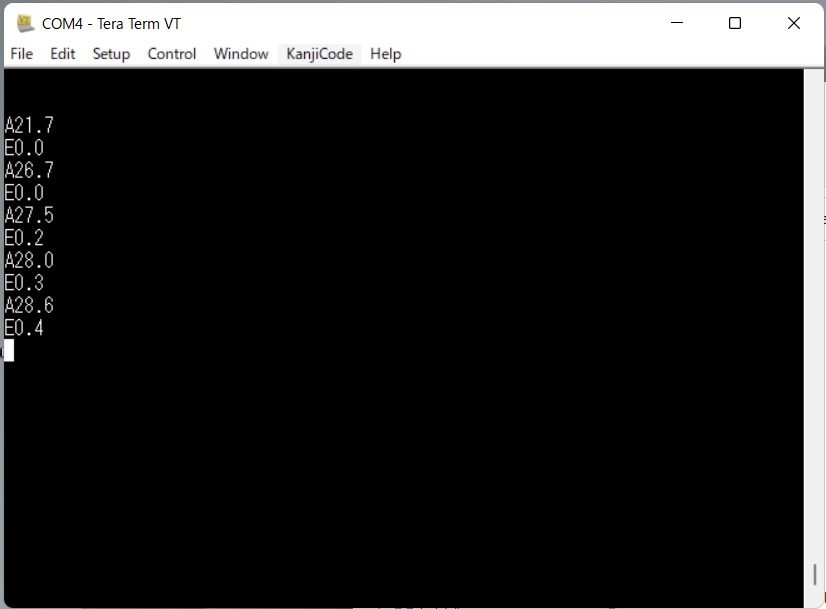
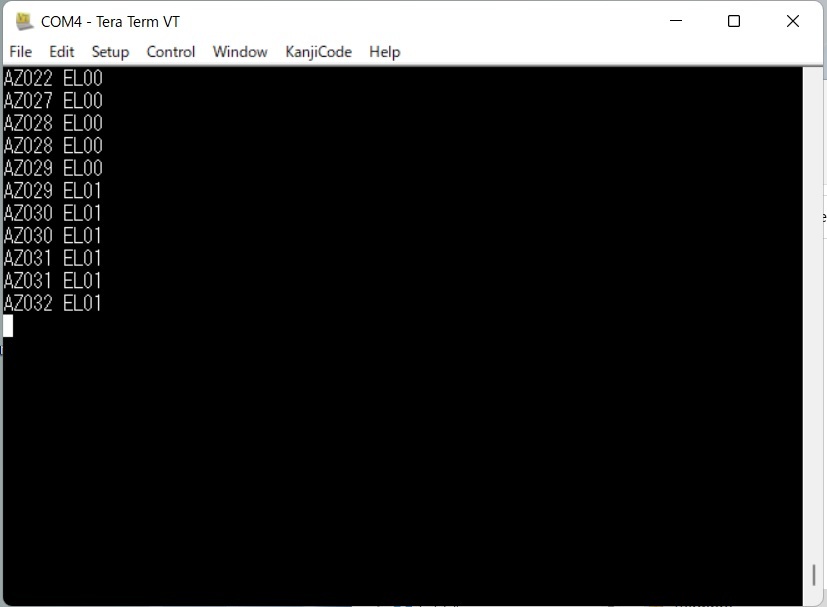
M2 AzElのデータ CD RAC825のデータ
こうして調べると、残念ながら、まず 衛星名を出力しているものはありませんでした 。
次に、 仰角がマイナスの時にデータを吐き出しているものもありませんでした 。
(つまり、衛星が視野範囲にある時のみデータが出力される)
衛星が視野範囲(aos in)に入る1分前に、その時点でのデータを吐き出しているものがありました 。(ただし、仰角は0度:実際はマイナスであるが)
事前検討でこの3つ点にこだわったのは、衛星の仰角がマイナスの間に、その時点の方向角にアンテナを回して事前準備し0度以上になった時点で追尾の自動スタートをする、途中で追尾衛星を切り替えたときに衛星名でそれを認識し、追尾制御に齟齬が発生しないように切り替える、1分前にどの時点のデータが送出されるのは、追尾事前準備、自動スタートに使えそうだということです。
こうした事前検討の結果として採用したのは、SatELです。
後でよく考えると、Creative Design RAC825 が良かったかなと思ってます。
理由は、送出されるデータ量が常に一定でミスの発生が避けられそうだからです。
SatELでもデータ読み込みのミスは出ていないようなので、今更作り直す気はないのですが.....
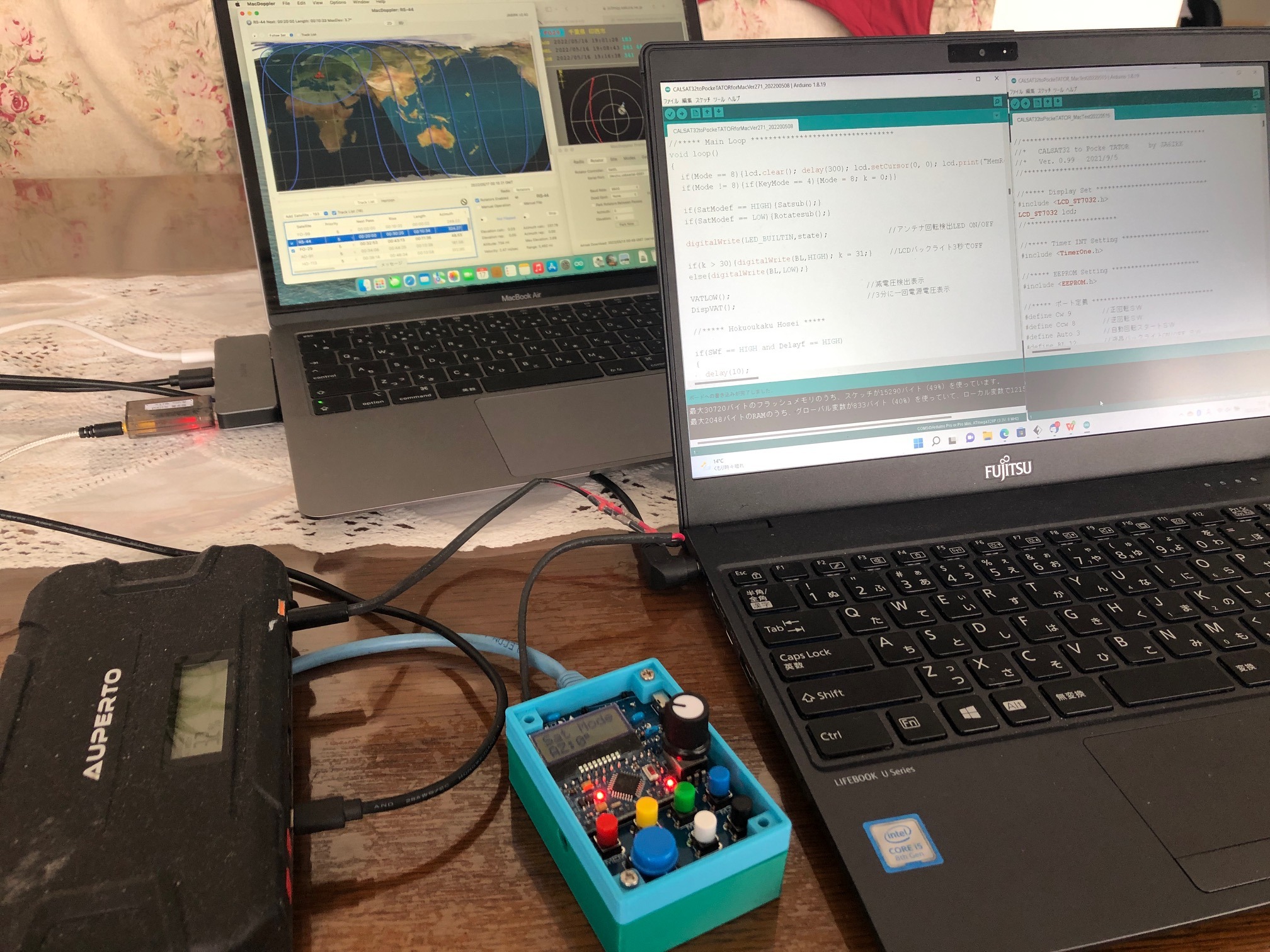
開発検証中の様子
実際にソフト改造をやってみて、衛星の自動追尾そのものは問題なくすんなりいったのですが、事前準備、自動スタートで苦戦しました。
理由は、Windows用自作中間アプリで送出されるデータをもとに、事前準備、自動追尾スタートの機能を作っており、MacDopplerから吐き出されるデータで同様の機能を実現するのに難儀したのと、元々Windows用に作った機能と交錯してしまって、迷路にはまってしまったからです。
継ぎ足し継ぎ足しでソフトを作ってきたので自分でも中身が見えなくなってます(汗;
事前準備、自動スタート機能を無しにしてもよかったのですが、マニュアルで事前にaos inの角度に事前設定しても、MacDopplerからの前のデータが残っていてそこに勝手に向いたり、何もなくて0度に向いたりです。
仮に、aos inが350度からで、0度になっていると350度まで回転してから追尾となり間に合いません。
それで何とかしようと、あ~でもない、こ~でもないと何度も何度もパステストを繰り返して時間ばかり過ぎていました。
基本的に現物思考で論理的思考ができないタイプなので、こういうのは不得意です。
結果として、Windows用に組み込んだルーチンなどを片っ端から外し、Mac用の専用ルーチンとして何とか動き始めました。
結果としての、今の動作は、MacDopplerで追尾衛星を選択し、コントローラーの追尾自動スタートボタンを押すと、aos in 1分前のデータで、その時点の衛星の方向に自動的に回転し停止待機、aos inした時点で自動追尾モードスタート、衛星の仰角が0度になった時点で自動追尾停止という機能となっています。


事前回転待機中 自動追尾中
Windows版は、仰角が0度でも衛星の方向角が変化すれば追尾していますが、MacDopplerからは、仰角マイナス時はデータが送出されないので認識手段がなく、0度になった時点で追尾停止の仕様となっています。
0度になってからの方法角の変化は少ないので実用上の問題は殆どないのではないかと思っています。
まだ完全ではないと思いますが、色々な衛星のパスでのテストでもなんとか動いている状況です。
北ゼロ度通過時の処理、途中で追尾衛星を変更した時の処理などもう少しテストを繰り返したいと思っています。
Pocke TATOR 機能追加・性能改善
(2022/4/24 11:12:09)

長文です。備忘録として投稿します。
最初にPocke TATORの検討を始めたのがいつ頃だったのか忘れてしまって、このBLOGを調べてみたら2020年8月でした。
自分用に検討を始めたのですが、プロト2、プロト3、プロトファイナルと紹介をしていたら、頒布のご要望が出てきて、頒布を開始したのがその年の12月でした。
http://blog.toshnet.com/article/187852481.html
http://blog.toshnet.com/article/188177319.html
約一年半が経過して、当初は430MHzや1.2GHzの軽量ヤギウダアンテナを回すのが目的でしたが、屋根裏での設置事例や、衛星通信(145MHz/435MHz)に使用されたり、ついには衛星通信の自動追尾への要求も出てきたり、衛星やるなら仰角も動かしたいという要望も出てきたりと、それなりにそれぞれが興味深く、対応を検討してきました。衛星の自動追尾は途中からソフト対応しました。
http://blog.toshnet.com/article/188441950.html
http://blog.toshnet.com/article/189143723.html
一方、何か新しいことをやると必ず課題や問題点が出てきます。都度、検討や対策をしてきましたが、なかなか収束せず、時間ばかりが経過してきていました。
そうした中で、何とかあらかたの対応ができたのでバージョンⅡとして展開することにしました。
まず、課題・問題点を整理します。
(1) アンテナが軽量(1Kg以下)でも、回転角度がズレる。
(2) 衛星自動追尾では、数十度のズレが発生することがある。
(3) モーター軸とアンテナポールのジョイントが3Dプリンタによる樹脂で強度が心配。
(4) 内蔵電池が006P型のため、衛星追尾などでは持たない。
(5) 衛星通信は色々忙しく、操作手順を単純化したい。
(6) マイコンボードやモーター等、価格、輸送費が大幅アップ。
今回の機能アップ・性能改善(改悪も含む)は、
基本は、角度ズレ対策がメインで一番大きな悩みで時間がかかりました。
(1) 回転角度ズレ対策として、基準角度検出スイッチ追加。(ズレても90度おきに補正)
(2) アンテナのイナーシャによるズレ防止のための回転制動機能追加。
(3) モーター軸とアンテナポールジョイントを金属製に変更。
(4) 衛星が可視範囲に入る前に、追尾の予約、AOS in時に自動追尾開始機能追加。
(5) 電池内蔵は無しに。(ケースは薄くなりました)
(6) 少し価格アップしました。(マイコンボードがなくなり次第再アップ?!)
問題・課題の考察と検討経過
一番の悩みは回転角度ズレで、アンテナを載せず本体のみであれば、正確に指定角度まで回転し、ゼロ度に戻せば、正確に戻ってくれます。
小型の軽量なアンテナでも、うまく動いてました。
しかし、430MHzの10エレ(1kgくらい)で衛星追尾するとズレるという報告をいただいてました。
しかも数十度ズレていることがあると。
自動追尾でなく、オートモードで、例えば30度とか50度回した時には、大きくずれていることはないとも。
衛星自動追尾は、2度ずつ回転するので、追尾が終わった時点でズレが累積しているのではないかというコメントもいただきました。
そこでイナーシャに相当するものとして2kGの鉄アレイの重りをブーム(50cm程度:室内での検証のため)の両サイドに取り付けて、2度ずつ回転させズレの発生状況を確認しました。確かにズレますが、数十度もズレることはありません。
一応対策として、回転角度が指定になった時にブレーキをかける、一瞬逆転させるなどの処理を入れてみました。効果はありましたが、逆回転は、イナーシャの少ない状態だと逆に少しづつ戻ってしまい回転角度が足らなくなるという弊害もありました。
ブレーキは効果がありそうなので、それで様子を見ていました。こちらではそれなりにうまく動いていたのですが、現場ではやはりズレるとのことでした。
ズレている様子をビデオに撮って送ってもらうと、回転を止めたときに反動で戻っていて、またその反動で回転方向、逆方向に振動しながら停止している様子が見れました。
ギアモーターにはバックラッシュがあるので、その分の回転ブレがあります。
これがイナーシャによるブレによって倍加されているのではないかと想定できました。
エンコーダーで回転を検出しているのですが、風などによるバックラッシュの分は、回転方向が分からないため誤検出となるので、停止後は検出を停止しています。
この現象は、回転中に意図的に手でアンテナポールを左右に回すとズレが発生し確認することができます。
しかし、鉄アレイの重りでテストした時は大丈夫だったのに何が違うのか?ということですが、ブーム長が1mを超え,1.5mほどになると意外と回転イナーシャが大きそうだと思いました。
試しに、50MHzの3エレのデルタループ(自作、重量は1kg以下)を使って衛星追尾してみました。
確かにズレます。ブーム長は2mあり、重量は軽いのですが、空間容積はかなりあります。
回転停止するときに振動しています。まさに原因はこれであることが分かり、こちらではこのアンテナで効果のある対策をすればOKだと判断しました。
モーターに負荷はかかるけれど、回転を抑えるように制動すれば振動が抑えられ、ズレがなくなるという報告もいただきました。
そこで、Pocke TATORに適用できる構造を検討しました。
出来上がったのが、写真のような構造です。



本体の天面を5mmのスポンジで、アンテナポールに取り付けた抑えで押付ける構造です。
この構造であれば、これまでのものに改造なく追加できます。
50MHz 3エレデルタループでテストしてみると効果は上々で、繰り返しの追尾テストでも、停止時の振動は抑えられ、ズレはほとんどありません。これが回転振動対策です。

スポンジが経時的にへこんで効果が薄れても、抑えなおせば効果を維持できます。
次は、ズレたときの補正方法です。
屋根裏設置では、ズレていても時々覗かないとわかりませんし、(カメラを導入していただいているケースもあります)面倒な作業です。
よくダイヤルで使うロータリーエンコーダーを搭載して回転方向も検出する方法とか、VRを使用して回転角をアナログ値で検出する方法などを考えましたが、前者は制御線が増えるのと、コントローラーの基板も変更が必要になります。後者は市販のローテーターで採用されている方法で、最初のプロト1がこの方法でしたが間違って余計に回転させてしまうとVRを破壊してしまうので止めました。
後になって衛星追尾を検討した時、殆どがこのVRの電圧値を使って追尾制御されておりこれでもよかったかな!と思ったりもしましたが。
現在のエンコーダースリットによるパルスカウント方式は、制御線が1本で済むのと、いくらでも回転でき(同軸ケーブルがあるので限界はありますが)、設置の時、北ゼロ度を向けた方向を北ゼロ度と設定できるので楽です。結果として、衛星追尾時に北ゼロ度を通過する衛星パスの時も±180度まで反転することなく衛星追尾が可能になりました。
このメリットを活かしながらの対策として、決まった角度(基準角度)にスイッチを置いてそこを通過した時の角度がマイコンの認識とあっているかどうかを確認して、違っていれば補正する方法を考えました。
問題は制御線の増加です。増やしたくありません。
そこでいただいたアイデアが、アナログ値検出です。パルスを送っている線に、スイッチが入った時にパルス高を変えて、この値を読むことでパルスをカウントしながらスイッチを検出することができます。
制御線は増えずこれまで通りです。運がいいことに、コントローラー側もこれまでの経緯で、このパルスカウントの線は、アナログポートと、割り込みポートの両方につながってました。
コントローラー側のハードの変更は一切ありません。
本体側のスイッチの取り付けも、検討の経過がありますが、結果としてそれまでの経緯で空いていた穴を流用して位置決めして取り付ける構造にできました。これによって、これまでの本体に追加の穴あけ加工などをせずにスイッチを取り付けることができました。



最初は、スイッチを押す突起構造は追加部品としたのですが、次の金属ジョイントを使用するためにエンコーダースリットプレートの設計を変更したので、スイッチを押す突起構造と一体化しました。
基準角度スイッチは、360度で一か所であるのですが、それだと、衛星追尾の時に必ずしもそのスイッチを通過するパスとは限らないので、補正が限られるというコメントもあり、90度ごとに360度で4回角度補正できるようにソフトを合わせて対応しました。これでかなりの確率で衛星パスでの補正が可能になりました。

基準角度の決定方法ですが、これまでは北ゼロ度にしたい方向で、ボタンを押して設定しましたが、今回は操作方法は同じで、北ゼロ度にしたい方向でボタンを押すと、アンテナは自動回転を始め、基準角度スイッチまで回転します。そのあと、北ゼロ度まで自動的に戻ります。
これによって、北ゼロ度に設定した方向が基準角度スイッチと何度の角度かを認識して記憶します。
よって、このスイッチの角度を通過するたびに、記憶した角度と違いがあれば補正をするという方式です。
最終的にスイッチを押す突起は90度ごとに4か所作り、90度ごとに補正ができる構造としました。
具体的なソフトでは、いくつかの判断基準の幅を作っています。
その次の対策は、モーター軸とアンテナポールを接続するジョイントの金属化です。
これまでは3Dプリンタで製作した樹脂製でした。これで問題は殆どなかったのですが、移動運用で本体を取り付けたマストごと転倒してしまいこのジョイントが破損したケースがありました。
また、重量の大きいアンテナ搭載で大風に何度も吹き付けられ軸を固定するネジが馬鹿になってしまうケースもありました。
特異ではありますが信頼度は上げておきたいと思っていて、いろいろ思案していましたが、軸穴を空ける作業が手作業では精度が出ないので棚上げになっていました。
そうした中で、6mmのネジ穴が元々あいている高ナットが使えそうだと思い試作をやってみたら、6mmのネジ穴を6mmのドリルで開けることによってセンターが取れ、モーター軸にピッタリ嵌まることが確認できました。
モーター軸、アルミのアンテナポールを固定する横ネジの加工は必要ですが、ボール盤とタップで何とか加工可能でした。

これまでは、電子工作と3Dプリントした樹脂の加工がメインでしたが、ついに鉄という金属加工までやることになり、いい意味では幅が広がりました。悪い意味では、切削油をかけてのボール盤作業となり、室内がついに金属加工作業場となってしまいました。
しかし、これで懸案のジョイントも解決しました。
次は、衛星追尾スタートの方法です。当局も、初心者ながら衛星通信をやりましたが、パスは5分から20分と短く、ループテストで送受信周波数合わせ、実際にはドップラー効果による周波数変動への対応など結構忙しいです。
アンテナの追尾はスタートしてしまえば自動になるので便利なのですが、衛星が視野範囲に入る前にやることが多くて衛星の自動追尾スタートを忘れてしまうことも多々ありました。
そこで自動追尾したい衛星を決めたら、視野範囲に入る前でもスタートボタンを押すことによって、その時点での衛星の方向に自動回転し、そのあと待機、その衛星が視野範囲に入った時点で自動追尾スタートする機能をソフトに入れ込みました。
勿論、衛星が範囲から外れたときには追尾も自動停止します。
このソフトの検証は、それに対応した衛星パスを見つけてのテストで結構時間がかかりました。
例えば、北ゼロ度通過前に待機した時、スタートが通過後だった時どういう挙動になるのか?
追尾中にほかの衛星に切り替えたらどうなるか? 待機中に切り替えたらとか!
漏れがあるかもしれませんが、一応それなりに動いているようです。
電池内蔵の件は、アンテナを回すモーターを回していますからそれほど持たないのはわかっていましたが、手動で動かす分には使いではあるかと!内蔵できるようにしていました。
しかし、衛星追尾となるとずっと動いていますのでまったく持ちません。
電池の場合もDCジャック端子接続で対応はできますし、今回外しました。
これによりケースの高さ方向は薄くなりスマートになっています。
最後に、製作コストですが、ギアモーターを始め主要部品は中国から調達しています。
理由は、こうした部品は中国が世界的に主力供給元となっており、価格も安いからです。
それによって低価格で作れていました。
しかし、最近では、中国調達よりAMAZONの在庫品が安いという逆転現象まで出てきています。
理由は色々あるのでしょうが、コロナの要因も一つ、半導体の世界的な供給不足は社会問題になっています。それに加え、ウクライナ問題、大幅な円安。原油高、中国調達の輸送コストも上がっています。
使用しているマイコンボードに至っては、3倍以上、調達することも危うい状況です。
マイコンを変えるとなるとソフトの書き直し、基板の変更など手間と時間とリスクを伴います。
現時点での手持ちマイコンボードの数も数えるほどですので、なくなり次第コストアップもやむを得ないかと考えてます。基板変更もありそうなので悩みは多いです。
今回は、モーターコスト、送料などのコストアップを反映せざるを得ませんでした。
すみません。
仰角対応の要望もあり、プロトもいくつか作って動作はしていますが、上記悩みの対応でその後進んでいないのが現状です。
http://blog.toshnet.com/article/189143723.html
実働で動いているのは2台のみです。
懸案の課題も対応が見えましたので、仰角付きもこの後進めたいと思います。
最後に、種々テスト、ご提案をいただきました、JK1LSE OM殿に深謝いたします。
145/435 クロスヤギウダ性能評価
(2022/1/28 14:29:59)

昨年、JK1LSE OM殿の設計監修にて145 4エレ、435 8エレのヤギウダアンテナを作成し、その性能評価を行い、実際には、Pocke ELETATOR(仰角付きローテーター)の試作品に搭載して初心者ながら衛星通信を楽しんでおりました。
http://blog.toshnet.com/article/189101335.html
http://blog.toshnet.com/article/189143723.html
そうした中で、Pocke TATOR(方向角のみ)にクロスヤギウダアンテナを、仰角15度~20度に固定して搭載して楽しんでおられる方もいらっしゃり(JK1LSE OMも屋根裏設置は同じ設定)、前回も4エレ、8エレで実験はしたものの、実際の設置には1mというブーム長の制限で設置しにくいという問題もあったので、1mブーム長の制約の中で設置しやすい、かつ軽量なクロスヤギウダアンテナを作ってみることにしました。
今回も設計監修は、JK1LSE OMにお願いしました。
結論から言うと、設計値としては、145 3エレは前回の4エレよりも若干(約1dB弱 利得アップ)良くなり、435 6エレは前回の8エレとほぼ同等の性能が得られました。
下図上段が今回の145 3エレ、435 6エレのシミュレーション値、下段が前回の145 4エレ、435 8エレのシミュレーション値です。
前回の評価では、シミュレーション値との比較において利得はほぼ同等、パターン図は測定環境の影響もありながら傾向は取れていたのかな?というのが結論でした。
今回も同様な結果が得られているであろうとの期待をしながら、実際にどのような性能が得られたのか、前回同様にパターンと利得の相対比較(ダイヤモンド製5エレ、10エレ)を行ってみました。


測定の様子。
下図は左が今回の145 3エレ、右がダイヤモンド製5エレです。
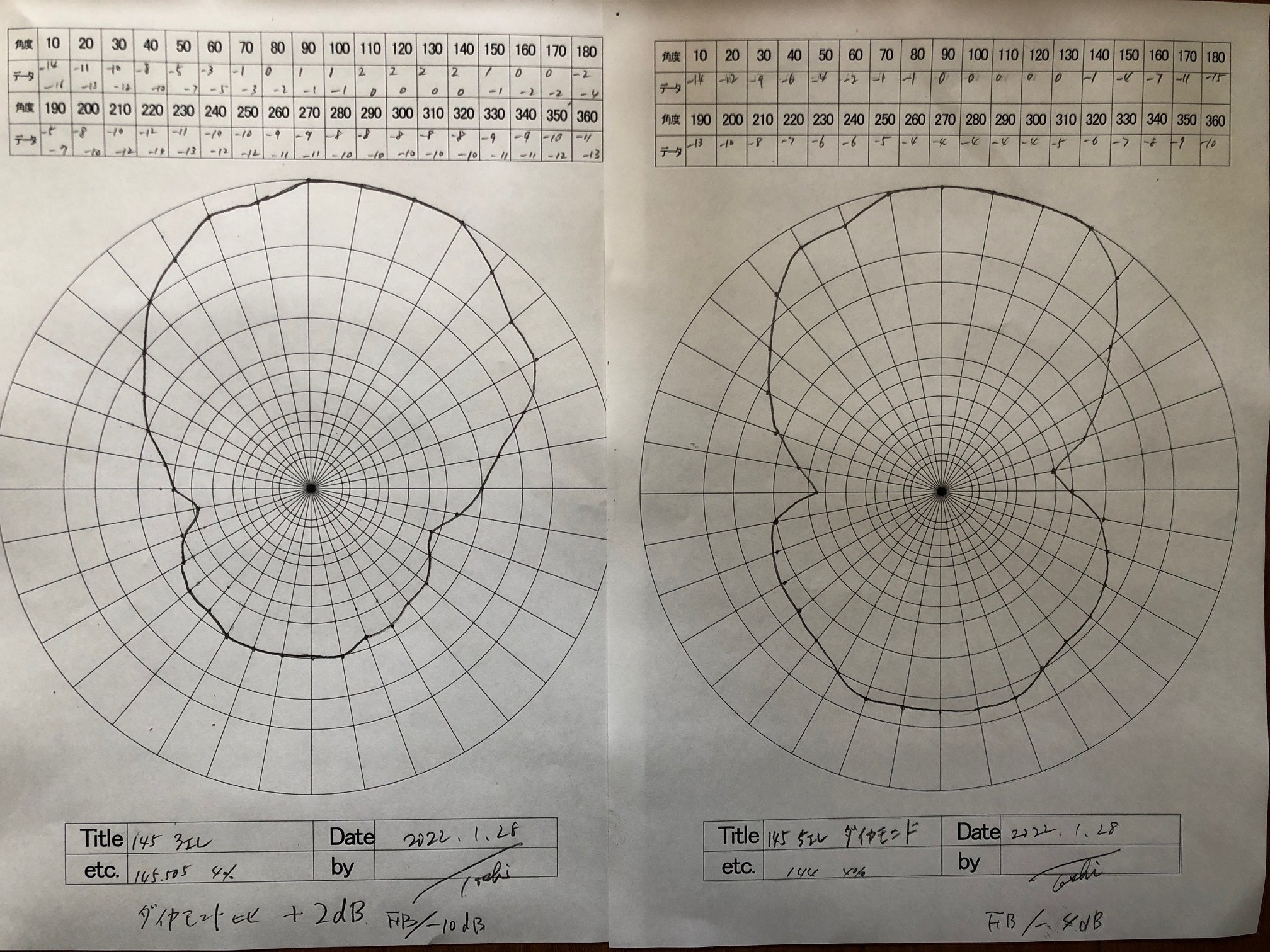
なんと、今回はダイヤモンド製5エレとの比較で2dBの利得アップとなっています。
(パターン図は0dBで正規化)
前回は、ほぼ同じ性能値(シミュレーション値とカタログ値)で同じ相対結果でしたが、今回シミュレーション値約1dBアップに対して2dB良い結果となりました。(つまり4エレより良い)
パターン図ですが、今回はFB比がかなり悪くなっています。特にダイヤモンド製は4dBしか取れていません。(前回も10dB程度ではありましたが)
今回製作の3エレも14dBと前回の約20dBに対して悪化しています。
この要因として考えられるのは、マストの影響です。前回は、マストの影響を考慮してマストからブームを張り出して、そこにアンテナを固定測定したのですが、実際の仕様を考えマストにほぼ直結する形で固定して測定しました。おそらくこの影響が出ているものと思われます。
(実際には、145MHzは水平にして使用するので本当は水平偏波で測定すべだったかもしれません)
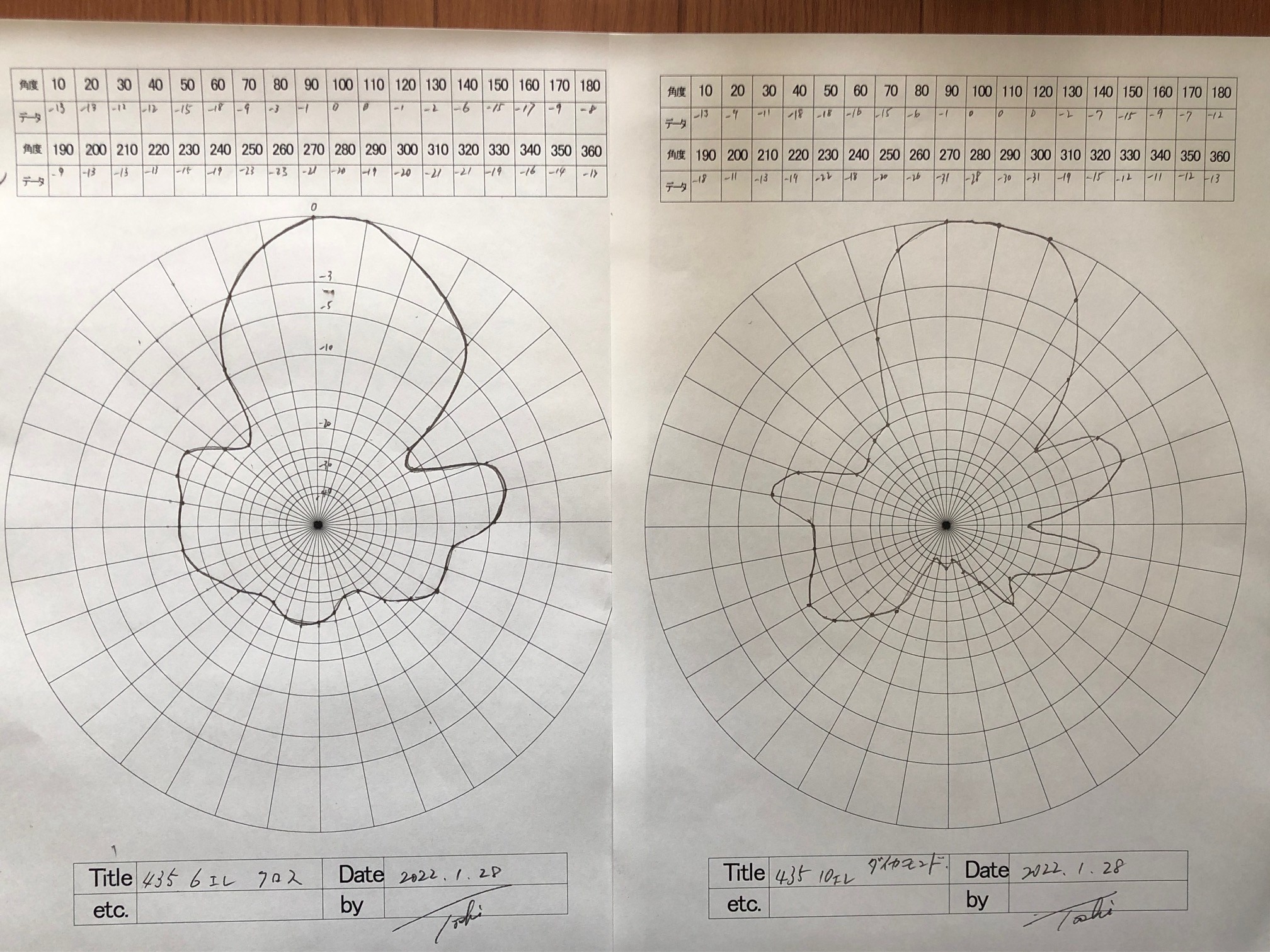
次の図は、435MHzです。こちらは、ダイヤモンド製と同じ利得となっています。
前回の比較では、8エレが約-1dBでしたので、6エレの方が1dBアップしたことになります。
パターン図は前回と同様の傾向が得られたかなと思います。435はエレメントが短く、マストにかぶらないので影響が出にくかったのではないかと思っています。
今回の測定は、ダイヤモンド製はそれぞれ独立した状態、自作の方はクロスに実装した状態で145・435で水平垂直を設置しなおして測定しました(測定はどちらも垂直)。
理由は、クロスした状態での互いの影響を加味した性能を見たかったからです。
結論として、前回の4エレ(145)、8エレ(435)に対して、今回は3エレ(145)で2dBアップ、6エレ(435)で1dBアップの性能となりました。
重量も、マストクランプ(15度/20度傾斜付き)を含めて、実測350gときわめて軽量に作ることができました。
めでたしめでたしです。
当局の環境における測定もほぼ再現性が取れているかなと!実感することもできました。
4エレ、8エレより、3エレ、6エレの方が良い利得となった結果については、ブーム長1mという制約の中での設計が難しかったということではないかと感じております。
それぞれ単独での性能は、測定しませんでしたが、前回の結果からほぼ同等であると思っております。
実際の衛星通信での使用においても、仰角固定であることから天頂通過時は厳しいものがありますが、概ね快調に動作してくれているかなと感じております。
、
Pocke DecoKeyer完成!
(2022/1/7 21:55:28)

年末にFRISKサイズのキーヤーPocke KeyerⅡにLCD表示ををつけ、結果的に外部マイコンも付加してCW解読機能も搭載した実験を行いましたが、注文していた基板、その他の部品も到着し、いつもの3Dプリンタによるケースも製作して、一応 CW解読機能付きK3NGソフト搭載キーヤーが形になりました。
名前は、デコーダー付きキーヤーと言うことで、
Pocke DecoKeyer にしました。
実験途中の様子は以下の記事です。
http://blog.toshnet.com/article/189219626.html
キーヤーの基本機能としては、Pocke KeyerⅡと同じでK3NGキーヤーがベースですが、大きく変わったのは、
① Goertzelアルゴリズムによる OH1JHM OM作成の
解読ソフトを搭載
② LCD表示器 を搭載
(CW解読のみならずK3NGキーヤー操作での機能表示を含む)
③ キーヤー出力は、2系統 搭載(いずれかの選択が可能)
④ キーヤー出力、CW解読のための音声入力部は接続リグとの
アースを分離絶縁
⑤ CW解読用に マイクも搭載
(ミニジャック挿入で外部入力に切替)
⑥ スラント型ケース でLCDの視認性、ボタンの操作性をアップ
(苦肉の構造ですが)
⑦ スリープ機能は非搭載
(これはデグレードです)
大きさもFRISKサイズのPocke KeyerⅡとの比較においてもコンパクトに仕上がったかな?!と思っています。




プログラムメモリー量の関係で、スリープ機能が入らなかったのでが残念ですが、その分電池は単4型を搭載するようにしたので少しは持つかと思っています。消費電流は、約10mA~12mAですので消し忘れは禁物です。
一応消し忘れ防止用に、電源ON時のLED表示も付けました。
(これも余計な電流を消費しますが)
現在、電源ONしっぱなしで何日(何時間!)持つのかテスト中です。
CW解読機能は、先日の記事にも書きましたが、完璧はないです。
しかし、PCでのタイプCWやエレキーでの信号はノイズの中でも比較的的確にデコードできています。
バグキーとか、縦振電鍵のような長短点差の大きいもの、揺らぎのある信号はとたんにデコード率が下がるようです。
人間の耳では、解読できるのですがね!(当局の耳より優秀ですが)
キーヤーのおまけとして補助的についていると思えば、いいのではないかと思いますし、送信の練習用には最適ではないかと思います。
関西から関東に出てきて約9年が経過し(一次2年間の大阪単身も含む)、タイミング的にデジタルが流行りだし、ほとんどがデジタルモードでの運用に変わってしまい、CWの運用が殆どなくなって受信力が大幅に低下してしまっておりますが、これを機にまたCW運用に少しは励もうかと考えております。
素晴らしいキーヤーソフトを開発された、K3NG OM そして解読ソフトを開発された OH1JHM OMに感謝申し上げます。
※ と、記事を書いてるうちに電池が消耗しました。つけっぱなしで時々出力して、約32時間でした。
使用した電池は、USBで充電できる単四型1.5Vのリチウムイオン電池です。元がおそらく3.7Vからの降圧ですから、消耗までずっと3Vを維持してくれますが、消耗すると突然電圧が下がる仕様です。
この電池の仕様の詳細は別として、容量は550mWhとなっていますので、1.5Vだと約360mAh、12mAの消費だと計算上は30.5時間ということになりほぼ電池の持つ仕様通りの寿命と言うことになります。
この時間を長いと考えるか短いと考えるかですが、当局的にはこんなものかと思っております。
アルカリ電池だともう少し容量の大きいものもあるようですが、初期電圧に対して、使い始めると急激に電圧が下がるようなので、回路的に定電圧化しないで使用していて、LCDのコントラストは早い時間に悪くなるのではないかと危惧しています。
そこで最近見つけたUSBで充電できる単4型のリチウムイオン電池を使ってみました。
消耗したと気づいた2時間ほど前までは、表示のコントラストに問題がなく3Vは維持していました。コントラストがなくなって気づいたのですが、その時の電圧は2.6Vくらいでした。
1本約550円と高いのですが。仕様上は1200回くらいまで充電できるとあり、半分だとしても1本1円相当になるので結果的にはとても安いかと!勝手に考えています。

こんな感じで充電します。通常のUSB電源が使えるのとType-CのUSBケーブルが使えるのが便利です。
蛇足でした。
今年最初の作品(Pocke SatDial)
(2022/1/1 17:32:04)

大晦日にエッチングして基板を作った 衛星通信用リグコントローラー の 操作用 マウスの代替え ダイヤルアダプター ですが、昨晩のうちに何とかケースのプロト1までできたものの、やはり問題が多く、正月早々ではありましたが、駅伝を見ながらプロト2を作ってみました。
昨晩は、 ダイヤルノブ に手持ちのものを使用していましたが、今日はこれも 3Dプリンタで製作 しました。
結果は上々で、特にダイヤルノブはこれまでに作ったものの中で最も良い出来となりました。
ケースとしても、プロト1より、5mmほど薄くなり、 裏蓋も製作 して、コンパクトな完成品となりました。


電源はUSBケーブル経由でPCからとれるので必要なく、マイコンボードにXiaoを使用したのでPCとは Type-CのUSBケーブルでの接続 となります。

大きさのイメージは、FRISKサイズキーヤーとの比較が左、手のひらに乗せたのが右です。
ダイヤルノブの直径は40mm です。


ケースは、手持ちのフィラメントがこれしかなかったのでオールグリーンの愛想のない配色ですが、これはこれで良しとします。
短期間で思った以上のものができて、自画自賛 です。
今年は、良いスタートができました。

execution time : 0.075 sec